
狙いは全国優勝で,そのために満点を取り,きれいに洗濯物を干すのを目標にして,その目標を期間内に達成するために必要なペースで開発を進めていきました.チームは意思疎通できるメンバーとリーダーのワンマン運営の組み合わせで動いています.そのため意志や方針は担当者と深く話し合い,すべてリーダーが決めます.
オー匠(自動機)
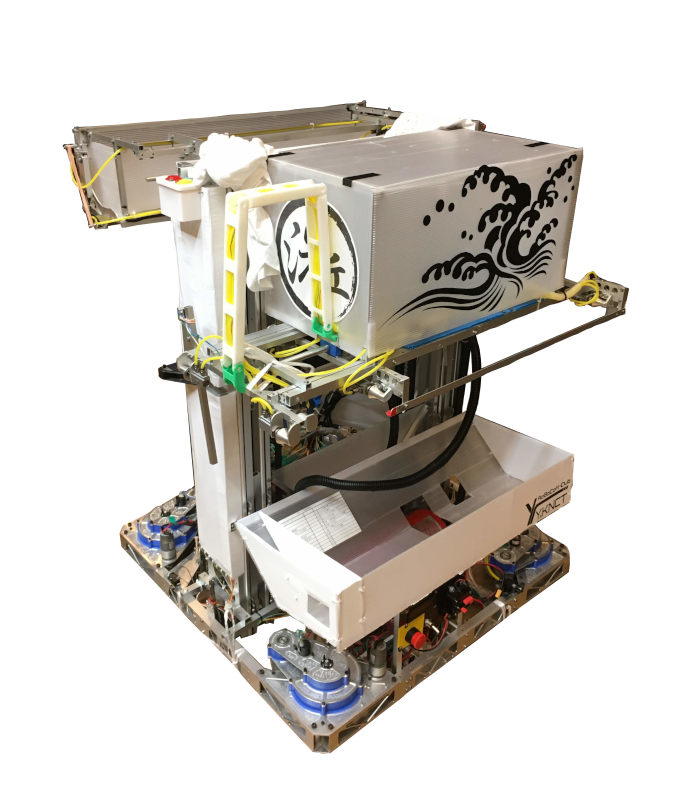
自動機であるオー匠はシーツとバスタオルを装填し物干しざおに干す部分を担当しています.
名前の由来:オートマ(AT)車からとってオー匠です.
移動機構
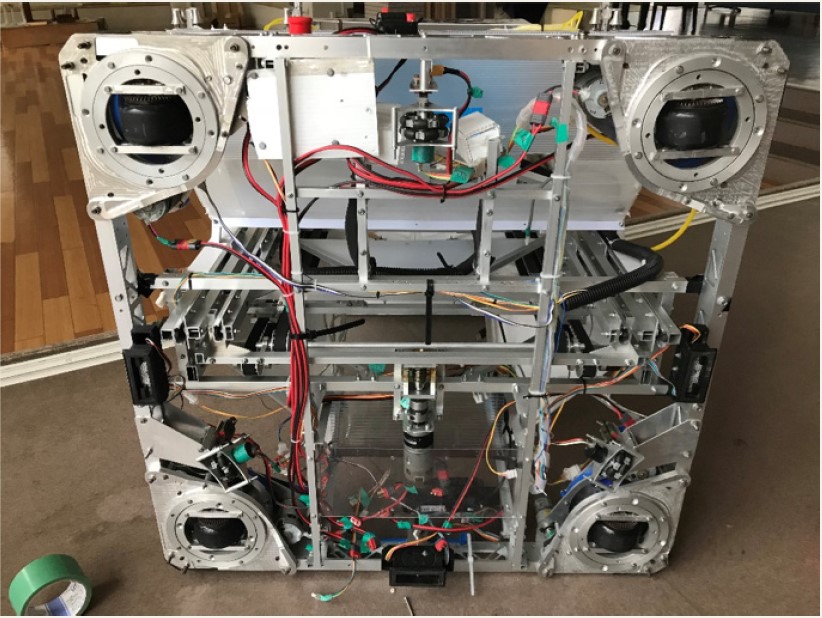
移動機構にはSwerve driveを使っています.回転する四輪のタイヤの方向をそれぞれ制御し全方位移動をします.タイヤごとの方向軸の角度はPIDを使用しています.
上下機構

長く使い続けることができ,外乱に左右されないことからベルト伝動による三段構造のユニットにしました.また,自重による落下を防ぐためにウォームギアを使っています.
赤外線カメラ
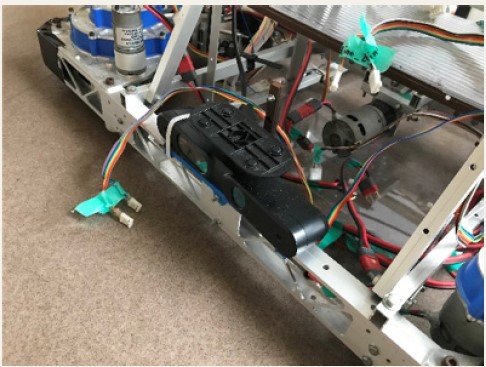
赤外線カメラはシーツ掛け機構と竿との距離を合わせるためにフィールドのフェンスを見て距離を割り出しています.
ラインセンサ

フォトセンサはフィールドの白線を認識するために使用していて,ライントレースは行わず,計測輪の誤差を修正するのに使っています.
マニュ匠(手動機)

手動機であるマニュ匠は,洗濯物の回収とTシャツを干す部分を担当しています.
名前の由来:マニュアル(MT)車からとってマニュ匠です.
回収アーム

タオル置き場の小さな第二タオルが詰めておかれていたので,タオルを手繰り寄せるだけでは隣のタオルと干渉する可能性があると考え,つかんで持ち上げることができるようにしました.
Tシャツ掛け機構

ロボットの上下機構についた溝にハンガーを付け,竿の前で上下機構を下げるというシンプルな機構です.ハンガーは自作できれいに見せるため,竿に掛ける部分を広くしてTシャツが前を向くようにしました.
地区大会バージョン
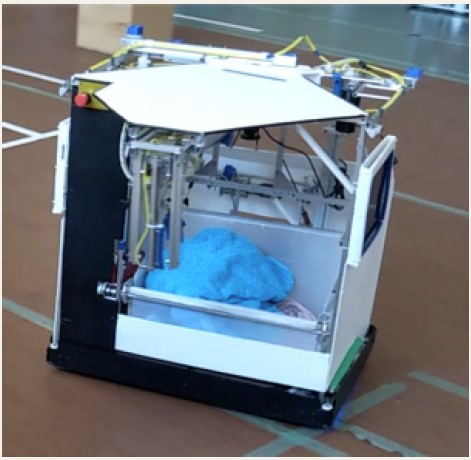
地区大会後から全国大会に向けて,洗濯物をより万能に回収するため,ロボットを4角形から3角形に変えました.
モニター

決勝でタオルを8枚並べたときに操縦者から見ると遠近感がわかりづらく,回収機構は1回の回収をシーケンスとして1個のボタンにまとめてありスピードも速いため,回収中にやり直しがきかづ,回収に失費すると販促になるため,位置をよく確認する必要があり,搭載しました.


コメント