Barista

当初は現在と違うアイデアを検討しており6月中旬ごろから"合体して大量得点"&"別々に動いて高速Vゴール"というコンセプトでの開発を始めました.
アイデア決定後、ロボットが合体するリフト部分や自動制御などロボットが射出モーションに至るまでに必要な動作を完成させることに全人員を集中させました。
射出機構はロボットの設計中など作業人員に余りが出る間に実験をするなどして効率よく開発を行い、アイデア決定約1カ月後にはある程度競技を行えるようになりました
それ以降は予選用・決勝用射出実験と自動制御の改良を並行して進め、夏休みの終わり頃にようやく40点台、20秒Vゴールを安定して達成できる性能に仕上がりました.
- 手動ロボ(サイフォン)
-

得点勝負とVゴール勝負を両立するために手動ロボットは,本体と二種類の投射機構の合計3つのユニットで構成されています. -
-
足回り 移動は4輪のオムニホイールと合体用の伸縮する足がついています 

-
投射機構 両ユニットともにエアシリンダまたは釣り竿を用いた直動型のものになっています.
これとは別に合体用のユニットには2段テーブル下段にボトルを立てる機構があります.


-
回路・プログラム マイコンはSTM32 F3 DISCOVERY,IDEはIAR Embedded Workbench,言語はCを使用しました.
手動機は3年生1人が担当しました.
回路ボックスが設けられ,中にバッテリーやマイコン,モータードライバ入っています
モータードライバ回路は,今年から大幅に更新されました
2017年度のオフシーズンより回路班の3年生1人の偉業により,フルブリッジ回路のモータドライバーになりました
ソケット型のマザーボードにより多くのモータードライバが場所を取られることなく,使用できるようになりました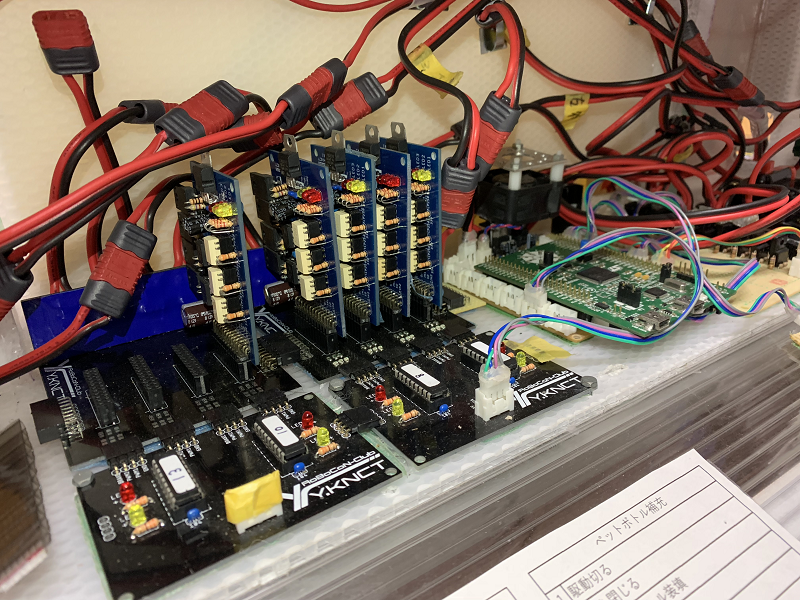

バッテリーは,回路用にHyperion LiPo 3S 11.1V 45C 2600mAh,
モーター駆動用にHyperion LiPo 5S 18.5V 45C 2600mAhを使用しています.
コントローラーはDUALSHOCK3を使用しました.
DUALSHOCK3の通信はBluetoothで行っているためSBDBTという通信モジュールを使用しました.
-
- 自動ロボ(エスプレッソ)
-

自動ロボットはロボット本体とVゴール用投射機構の2つのユニットで構成されています.本体には自動ロボットを持ち上げるためのリフト機構がついています.
投射機構は5つ搭載されており,それぞれのテーブルに2本ずつ射出していきます. -
-
自己位置推定 距離測定用のエンコーダ(3輪),ライン検知用のフォトセンサ,テーブルやフェンスとの距離を測定するPSDセンサ・リミットスイッチをロボットに搭載しました. 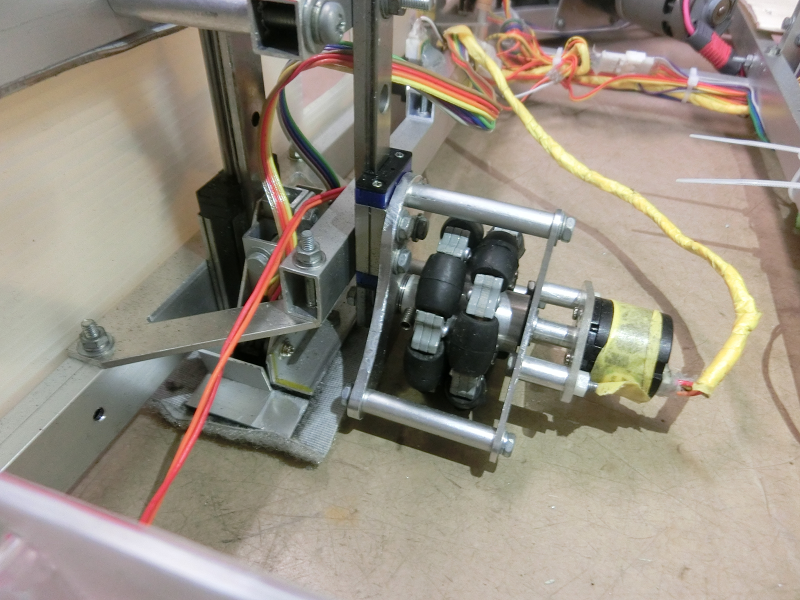
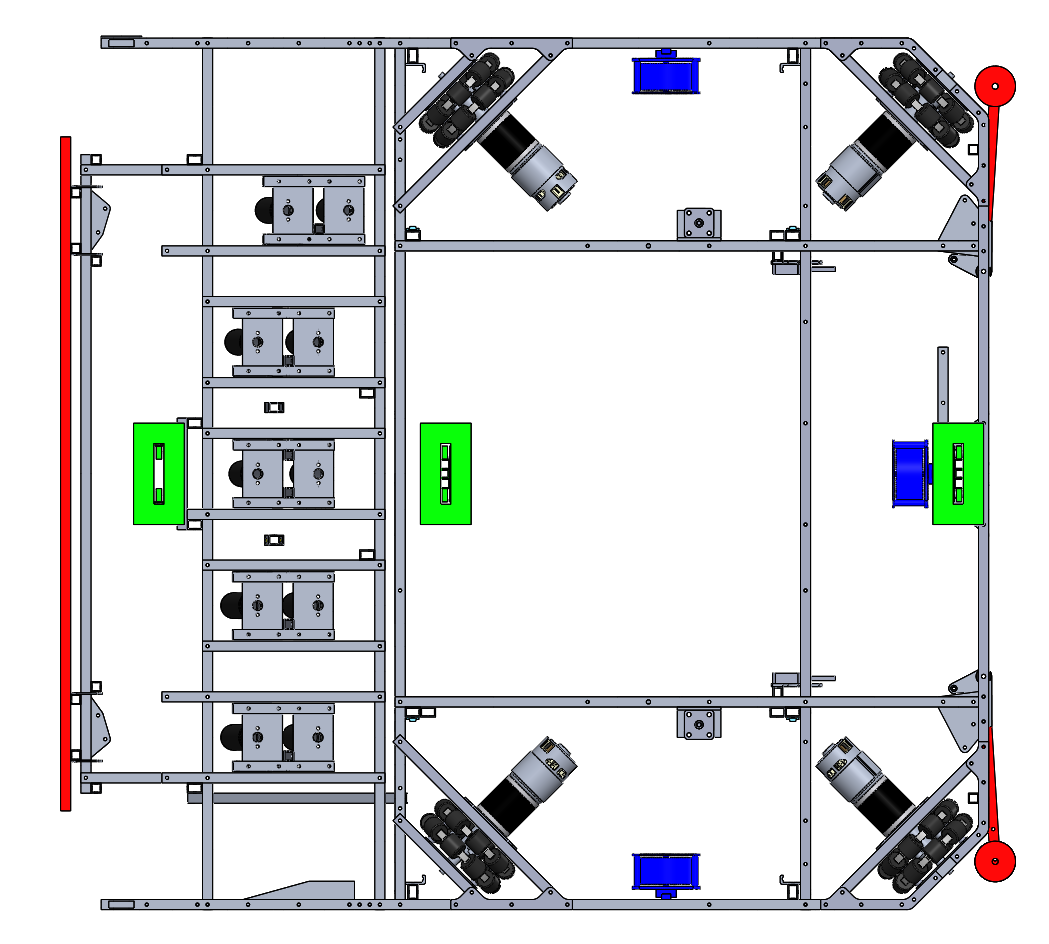
赤:リミットスイッチ
青:ロータリーエンコーダ
緑:フォトセンサ -
合体機構 
合体用のリフトは本体四隅のラックピニオンを用いて昇降させています.これらは全て1つの駆動からの伝動で動かしています. -
投射機構 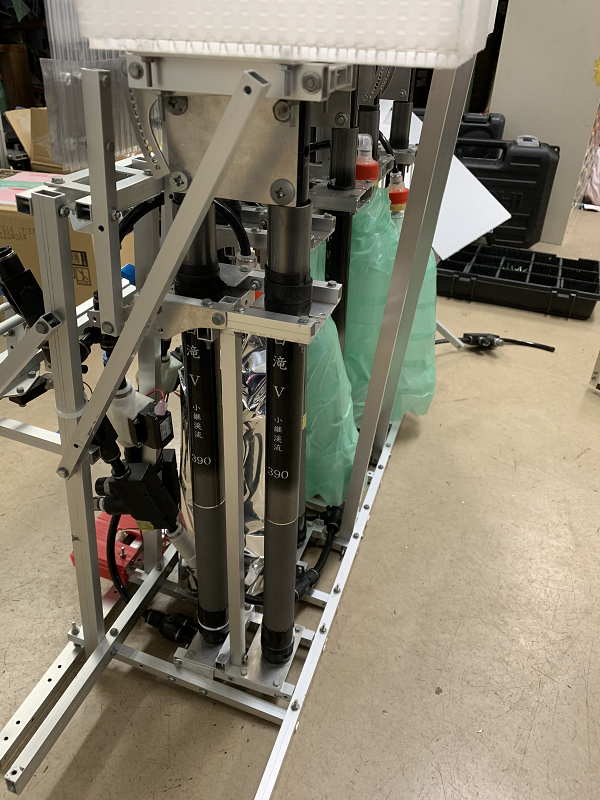
手動ロボットと同じく釣り竿で,1つの機構に2本並列で用いています.こうすることで安定してボトルを射出することができるようになりました
(尚,全国大会の準決勝で起こった事件は謎に包まれたまま...) -
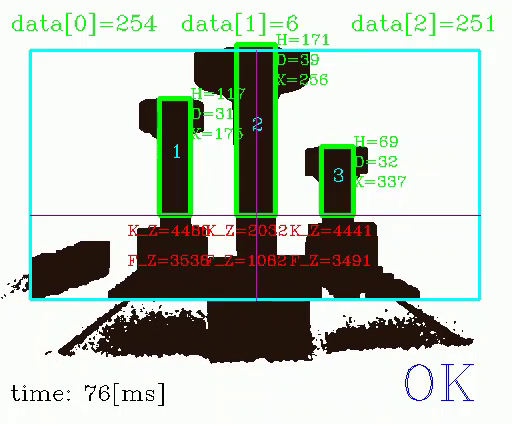
画像処理 八代ロボコン部は2015年に画像処理が採用されていました.
しかし,その年以降ノウハウを持つ者が1人もいませんでした.
その技術を無駄にはしたくないと,当時3年の回路班の1人がオフシーズンから開発を進めていました
そして2018年に採用され,コントロールステーションから,Kinectを使用してテーブルの位置を認識しています.
Challengerで使われていたアルゴリズムを応用させて,今大会で使用しました
IDEはVC++2017,ライブラリはOpenCV,Kinect V2 SDKを使用しています.
自動機とXbeeで通信を行っています
自動ロボットはスタートスイッチを押した瞬間にこのデータを読み込み,ルートを計算します.
使用したPCは,Microsoft Surface Pro です.
-
回路・プログラム 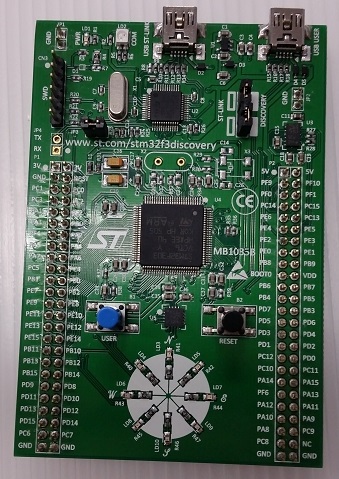
マイコンはSTM32 F3 DISCOVERY,IDEはIAR Embedded Workbench,言語はCを使用しました.
自動機は2年生1人と五年生1人が担当しました.
モータードライバ回路は,手動機と同じくフルブリッジ回路のモータドライバーを使用しました最短経路生成 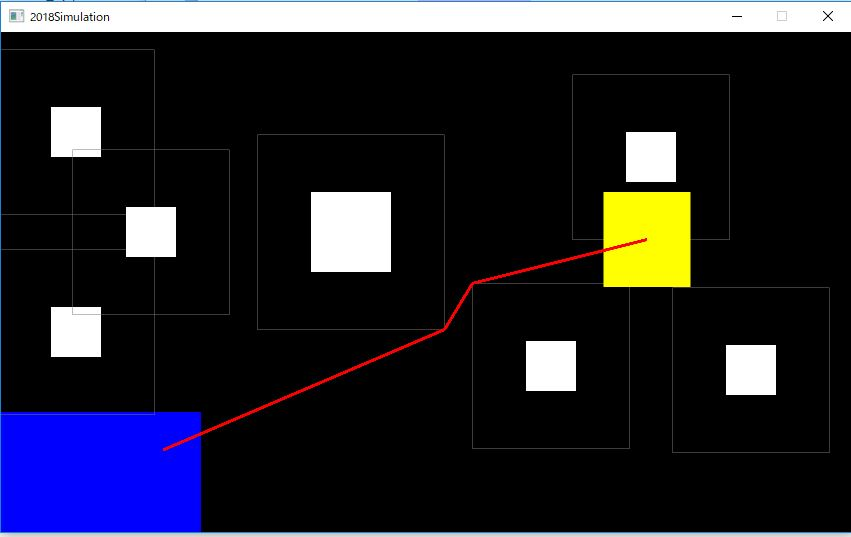
高速なVゴールを実現するために最短アルゴリズムを自作しました.
まず,目標座標と現在座標を結んで,ポールに当たり判定があり,そこに被っていたら,
ポールの中心からみてどこを通過しているかでポールの四つ角のどこに逃がすかを決めます.
そしてその座標から線を引いて目標座標との間に当たり判定があったら....
と繰り返しています
そしてルートを複数生成し,距離,曲がり角を点数化し,
点数が一番少ないものを選ぶといったことをしてルートを計算しています
アルゴリズム設計者は,五年生が担当しました.
バッテリーは,回路用にHyperion LiPo 3S 11.1V 45C 2600mAh,
モーター駆動用にHyperion LiPo 5S 18.5V 45C 2600mAhを使用しています.
-

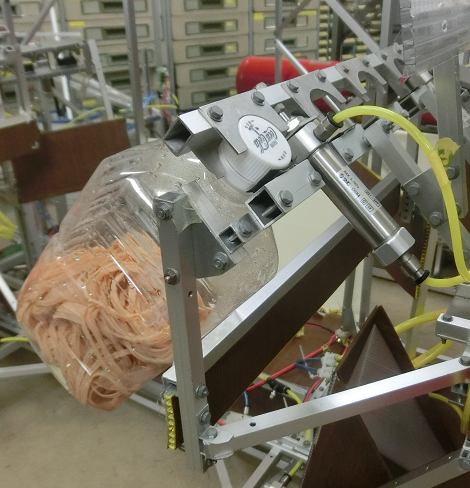
- ペットボトル
-

今大会のペットボトルの中身は,どの高専も消臭ビーズが用いられていましたが
八代は中に「輪ゴム」と少量の水を入れました
ルール発表後,ペットボトルの中身について実験がすぐさま行われ,
とりあえず身の回りにあるものを入れて実験しました
すると,輪ゴムを入れたペットボトルが一番倒れづらかったため,採用しました
下の動画は,落下の衝撃を輪ゴムが吸収する動画と練習動画です