Mollux
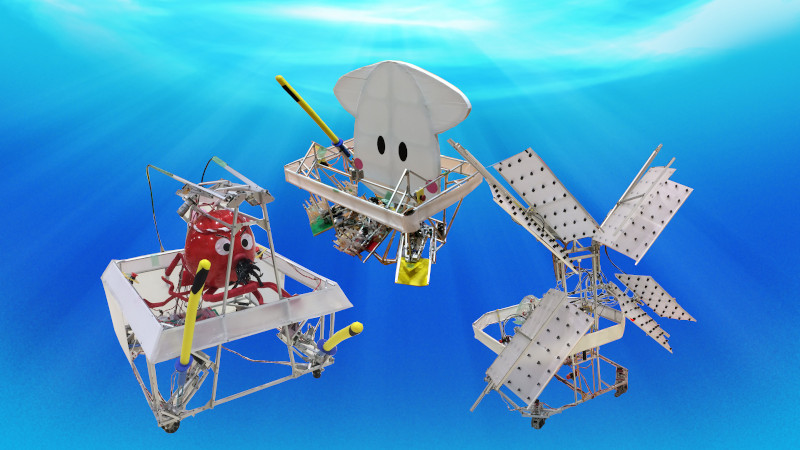
Molluxは3台のロボットで構成されています.
軟体動物ということなので,ロボットの名前もそれぞれ,タコ,イカ,ウミウシと呼んでいます.
地区大会では,3台のロボットを出す予定でしたが,結局2台しか動かさず
残り1台は一度も大会で動かすことはなく,悲しい結果に終わってしまいました
- タコ
-
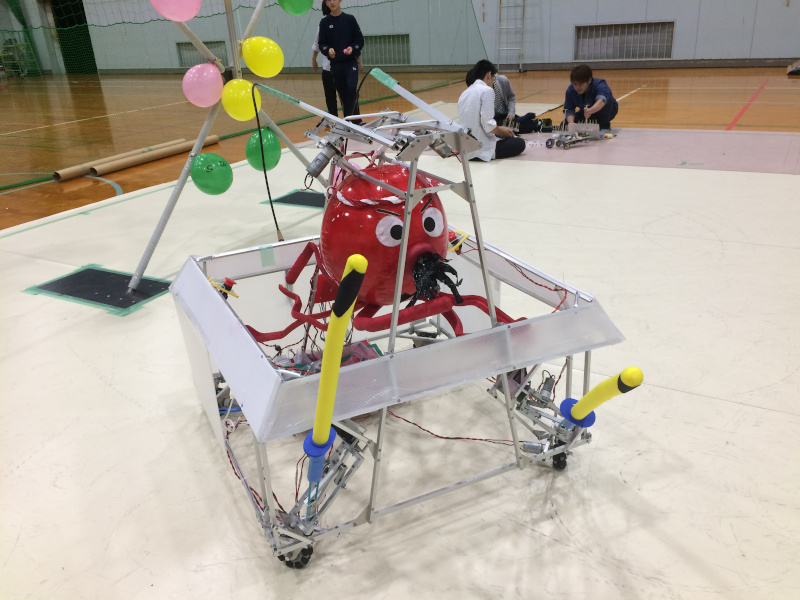
このロボットはMolluxの中で主にロボットと本陣に対しての攻撃を担当していたロボットです. -
移動機構 足回りには全方位移動を可能にするために4輪オムニホイールを採用しました.
2016年までオムニホイールはVistoneのダブルプラスチックオムニホイールを使用していましたが,
2017年はグリップの観点からHANGFAのQL-10を使用しました.
八代としての初のHANGFA製品の導入でしたがあまりのグリップ力にオムニホイールの概念が変わりました.
モーターには試供品のRS-555-VCに27:1のギヤヘッドを取り付けて使用しました.
またモーターにノイズ対策のためにアルミテープを巻いていました.(効果があったかは不明ですが...)
-
攻撃ユニット1 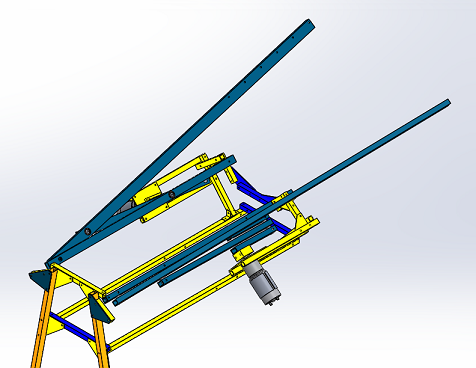
このユニットは"タコ"の秘密道具である"ムチ"を振るために開発したもので,
揺動角が約160°~170°の揺動リンクを二つ本陣上部に沿うように斜め45°に配置したものです.
モーターやフレームに掛かる負荷が非常に大きく,ロボットを動かした際,よく壊れる部分でもありました.
リンクのいたるところにガタや衝撃防止の工夫が施されています. -
攻撃ユニット2 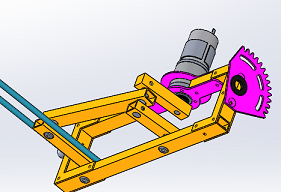
このユニットは"タコ"に2本搭載した"刀"を振るために開発したもので,
揺動角が約90°の揺動リンクを2つ本陣下部に沿うように斜め45°に配置したものです.
リンクのユニットをパワーウィンドウモータで丸ごと回転させることで刀の自由度を持たせていました.
また刀とリンクの揺動部を直接繋がず,間にグラスファイバーの棒を挟むことで
スナップが付きやすくなると同時に刀の中の芯が折れるのを防止していました. -
外装 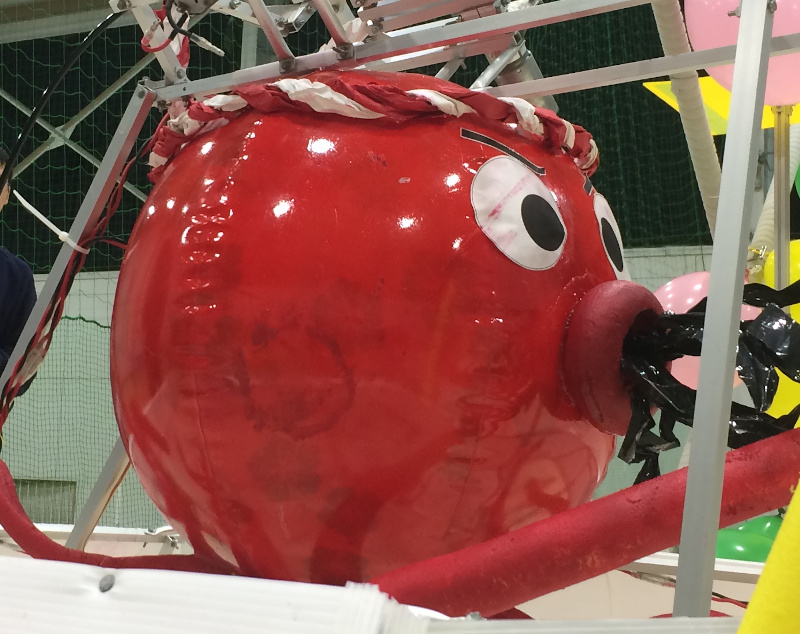
タコの外装は100均ビーチボールを赤く塗装したものです.
タコの足は折れて使えなくなったチャンバラキングネオを再利用していました. -
回路・プログラム 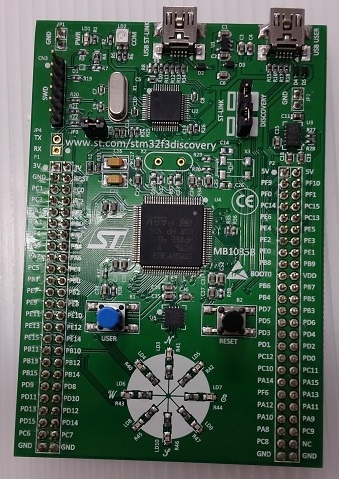
マイコンはSTM32 F3 DISCOVERY,IDEはIAR Embedded Workbench,言語はCを使用しました.
タコは2年生の回路班1人が担当しました.
モータードライバ回路は,2016年と同じモータドライバーを使用しました.
コントローラーはDUALSHOCK3を使用しました.
DUALSHOCK3の通信はBluetoothで行っているためSBDBTという通信モジュールを使用しました.
バッテリーは,回路用にHyperion LiPo 3S 11.1V 45C 2600mAh,
モーター駆動用にHyperion LiPo 5S 18.5V 45C 2600mAhを使用しています.
- イカ
-
このロボットの特徴は,親機(親イカ)から出るアームと称した3台の子機(子イカ)を操縦し,
それぞれから射出されるやすりの付いたたくさんの秘密道具(孫イカ)が相手ロボットや本陣を攻撃するところです. -
親機 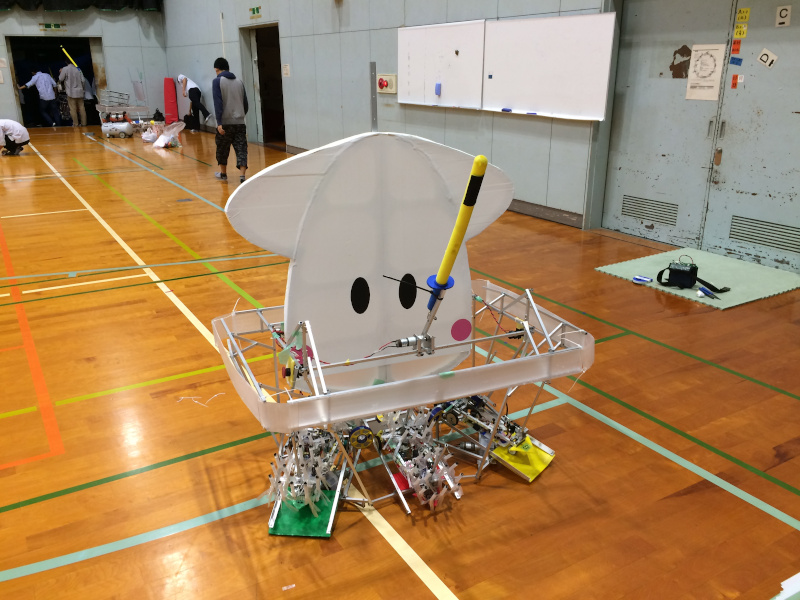
親機の足回りにはオムニホイール,子機の足回りには2輪駆動と1輪のステアリングを使用しています
残念ながら,大会では出番がありませんでした. -
子機 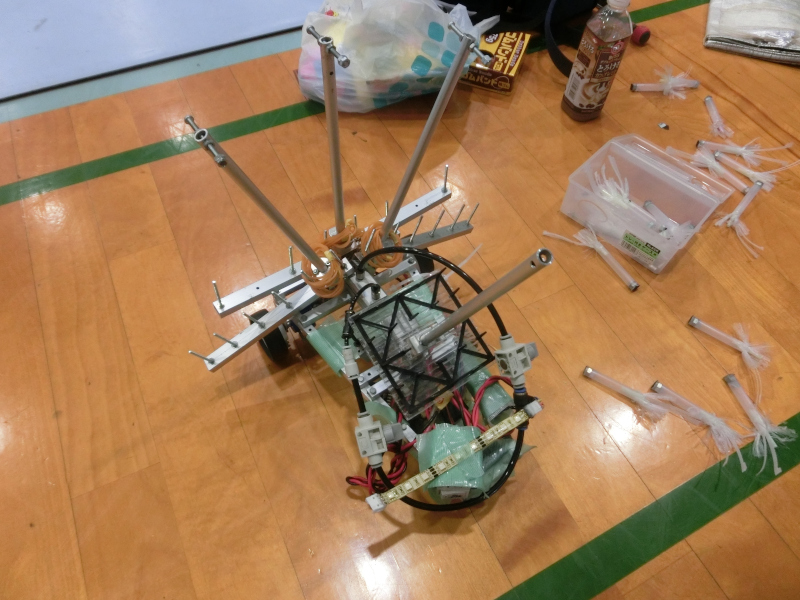
子機は親機とひもで繋がっているため,ひもの長さの限り展開が可能です
射出機構は,エアシリンダでロックを解除し,ゴムの力で射出します.
1台につき,1つのコントローラーで操縦するため,1人が親機と子機,もう一人が子機を二台操縦しなければならず,
とても難しかったです.コントローラーにはWiiのヌンチャクを改造して使用しています. -
秘密道具 秘密道具は,タピオカストローに足のようなビニールテープと頭のようなヤスリを貼り
イカを模しています
-
回路・プログラム 
マイコンはArduino pro mini ,IDEはArduino IDE,言語はCを使用しました.
イカは回路班の人数不足もあり,4年生1人と,5年生1人が担当しました.
モータードライバ回路は,2016年と同じモータドライバーを使用しました.
コントローラーは今大会で初のWiiのヌンチャクを使用しました.
Arduino pro mini へ信号を送信し,Xbeeで本体に通信を行いました.
子機のコントローラーに使いましたが,操作がとても難しかったそうです.
親機のコントローラーは,前年と変わらず,Dualshock2をXbeeでの通信を行いました.
親機
バッテリーは,回路用にHyperion LiPo 3S 11.1V 45C 2600mAh,
モーター駆動用にHyperion LiPo 5S 18.5V 45C 2600mAhを使用しています.
子機
バッテリーは,回路用にHyperion LiPo 3S 11.1V 45C 1100mAh,
モーター駆動用にHyperion LiPo 4S 14.8V 45C 2600mAhを使用しています.
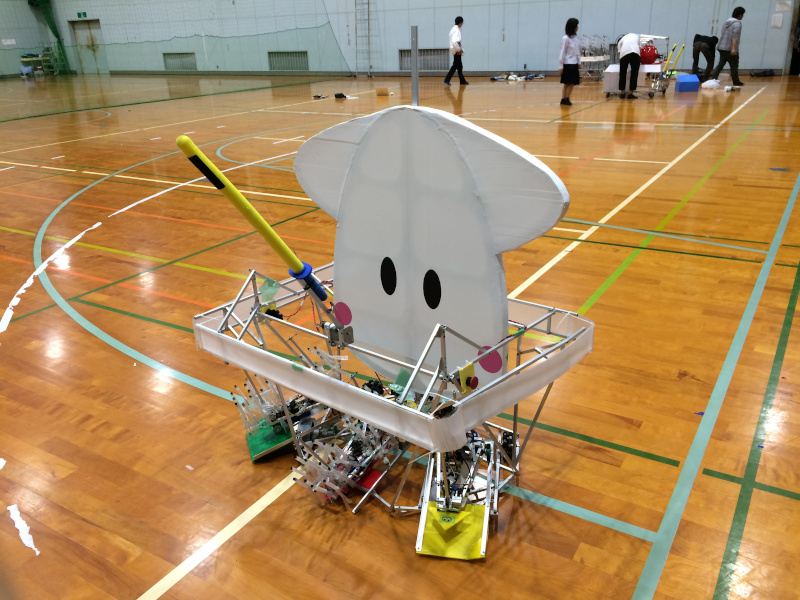
- ウミウシ
-
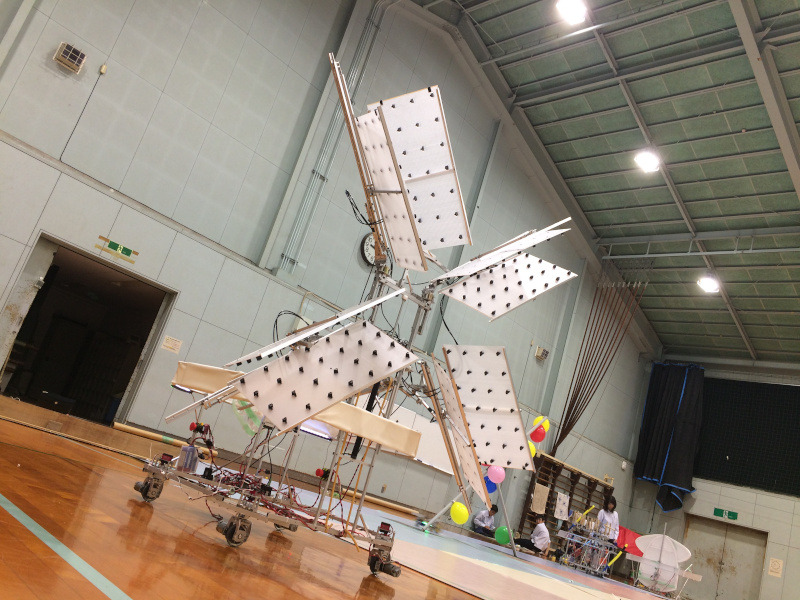
本陣に付いている風船を一気に全て割ることを目標に製作したロボットです. -
バタバタ機構 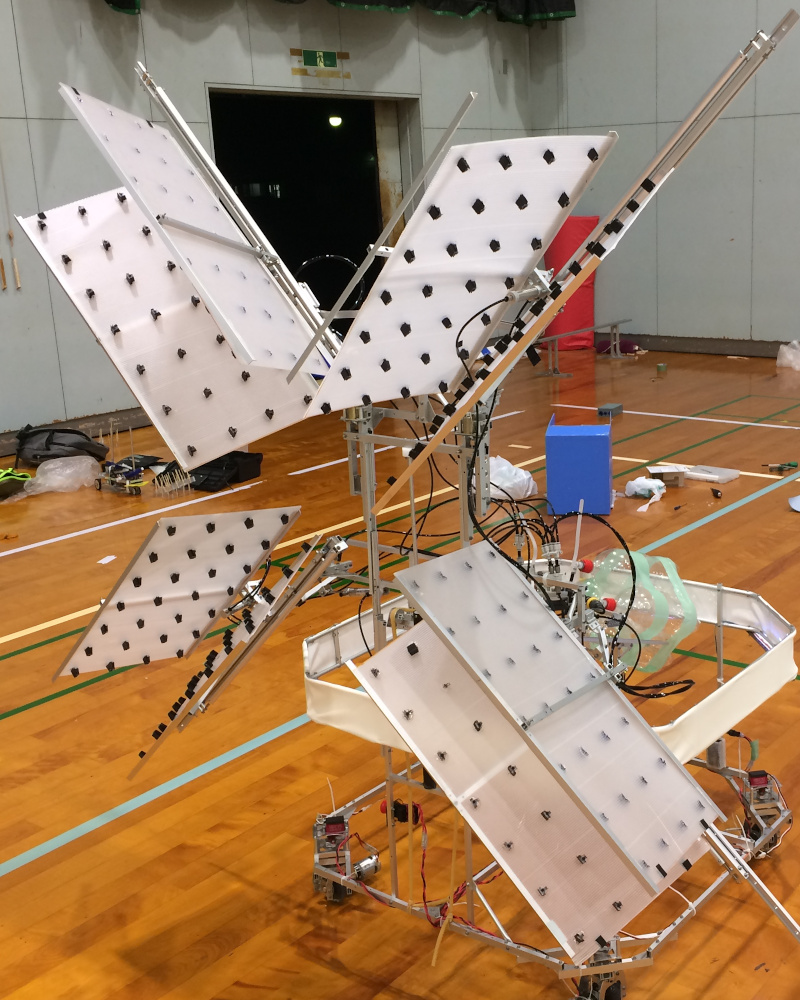
風船を正面から割る方式で挑みました
とげとげの先端にヤスリを貼り付けて割れやすくしました. -
展開機構 1つのバタバタ機構をロボットに4つ搭載し,それらを初期状態から広げて使うための機構です
ゴムとエアシリンダを組み合わせて展開します. -
バンパー アルミパイプを曲げて製作しました. 
-
足回り 当初を4輪ステアリングを使っていましたが,最終的にはオムニホイールを4輪使っています. 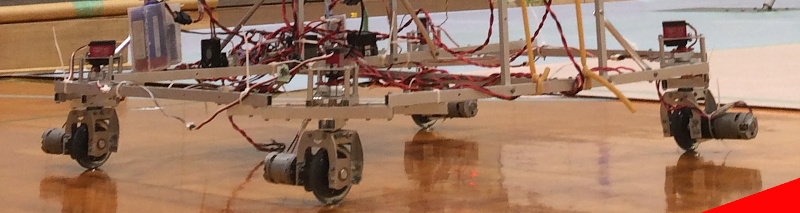
-
回路・プログラム
マイコンはSTM32 F3 DISCOVERY,IDEはIAR Embedded Workbench,言語はCを使用しました.
ウミウシは2年生の回路班1人が担当しました.
モータードライバ回路は,2016年と同じモータドライバーを使用しました.
コントローラーはDUALSHOCK3を使用しました.
DUALSHOCK3の通信はBluetoothで行っているためSBDBTという通信モジュールを使用しました.
バッテリーは,回路用にHyperion LiPo 3S 11.1V 45C 2600mAh,
モーター駆動用にHyperion LiPo 5S 18.5V 45C 2600mAhを使用しています.