火の国

一度に本陣の風船全てを割ることの出来る機構(4点バースト)を搭載し,
最速で本陣を落とすことを目標としたロボットです.
- 本陣突撃用ロボット(ジャージー)
-
本陣攻撃機構(4点バースト) 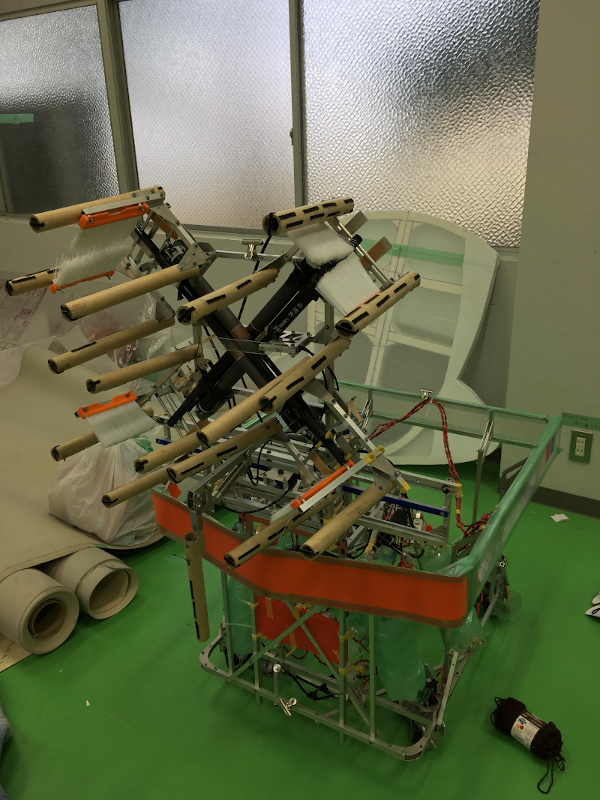
本陣の風船を一度に全て割ることの出来る機構です.釣り竿を本陣に沿うように配置しています.
秘密道具である紙管を竿の先に複数取り付けています.
練習中に秘密道具が本陣のクリップに引っかかることがあったため,100円ショップの卓上のほうきを竿の先につけています -
起き上がり機構 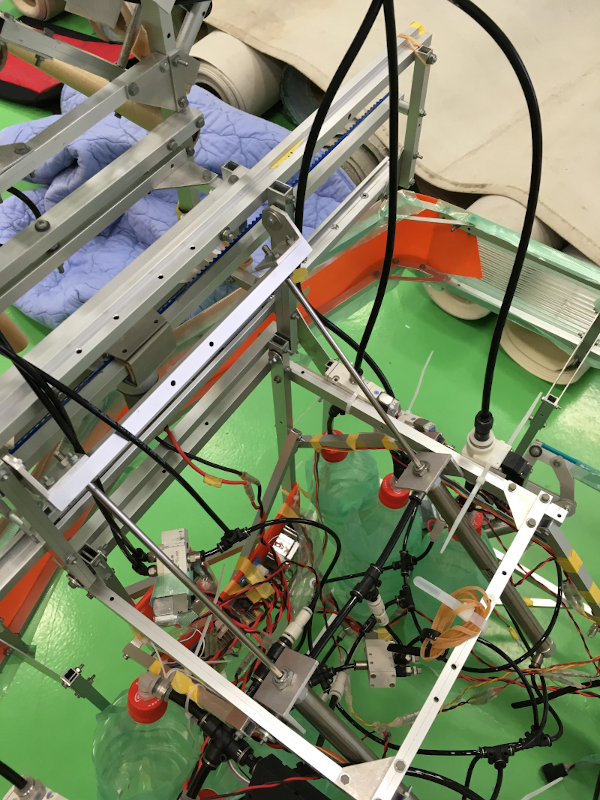

スタート時には倒している本陣攻撃機構を起き上がらせ,本陣にセットできるようにする機構です.
スタート時から本陣機構を起き上がらせたままだと寸法オーバーしてしまうためこの機構を搭載することになりました
また,ラックとピニオンにより横移動もできるようになっており,足回りでの微調整が必要ありません. -
刀用機構 刀を振るための機構です.エアシリンダとリンク機構を用い,
さらに刀を園芸用の棒に取り付けれるようにししなるようにしました. -
足回り 足回りには,サーボモータを使用したステアリング機構を採用しています 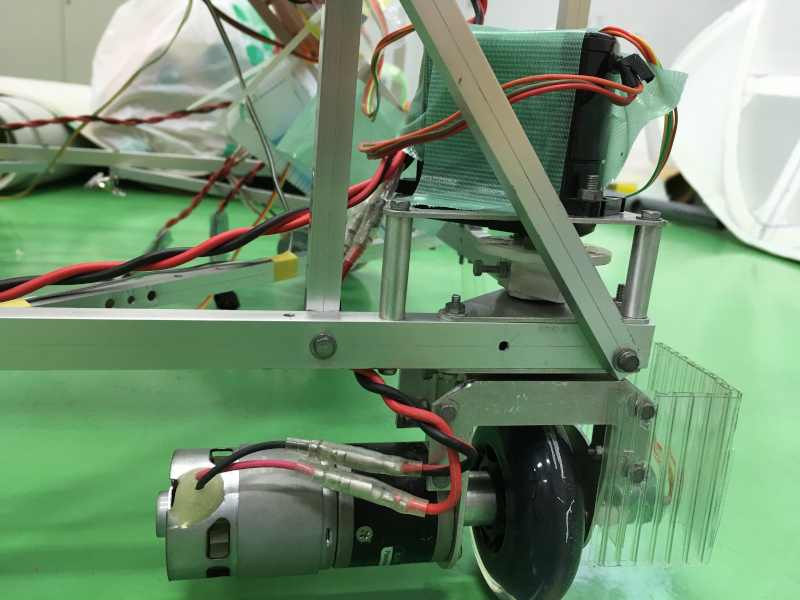
-
秘密道具 紙管に細かく切った布やすりを貼り使用しています.硬いものなので,風船が割れなくても
クリップから外すことが出来ていました
固定はねじ止めです
- 遠距離攻撃用ロボット(う~ま君)
-
射出機構 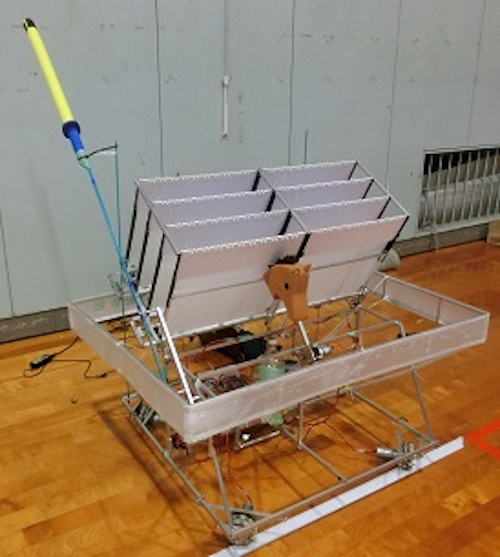
21mmのぷらフックに秘密道具の穴をひっかけ,発射機構先端に切れ込みにゴムをひっかけるようになっています
エアシリンダを動かすことでプレートがプラフックを外し,秘密道具を発射します
エアシリンダは自作の者を使用しました.1試合で80発装填することができ,4回に分けて発射します. -
刀 チェビシェフリンクで刀を振っています.
刀を取り付ける部分には,ダンポールと言われる園芸用の支柱を使用しました.
これは軽くしなる素材のため,リンクで動くことのできる場所以外の風船も割ることが出来ます -
秘密道具(ロケット) 先端についているゴムを引っ張って放すことで飛ばします.
本体にはタピオカ用のストロー,羽根にはクリアファイルを使用しています.
この羽根はダーツの羽根を参考に作りました.先端はグルーガンを詰めて作りました.
ゴムをつけている部分には丸くくりぬいた消しゴムを入れています.
羽根の固定と先端にグルーガンを使用しているため,大量のグルースティックを消費しました
- 制御
-
回路 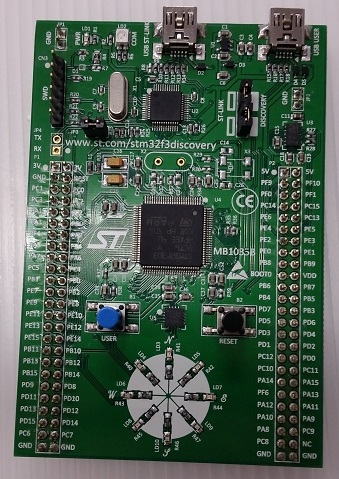
どちらのロボットとも,STM32 F3 DISCOVERY の評価ボードを使用しています.IDEはIAR Embedded Workbench 言語はCを使用しました
回路製作,プログラミングは2年生1人が遠距離ロボットを担当しました
本陣用ロボットは3年生1人が担当しました
コントローラーはDUALSHOCK3を使用しました.
DUALSHOCK3の通信はBluetoothで行っているためSBDBTという通信モジュールを使用しました.
バッテリーは両方ともそれぞれ回路用にLipo 3S 11.1V 2600mAh,
駆動用にLipo 5S 18.5V 2600mAh を使用しました.