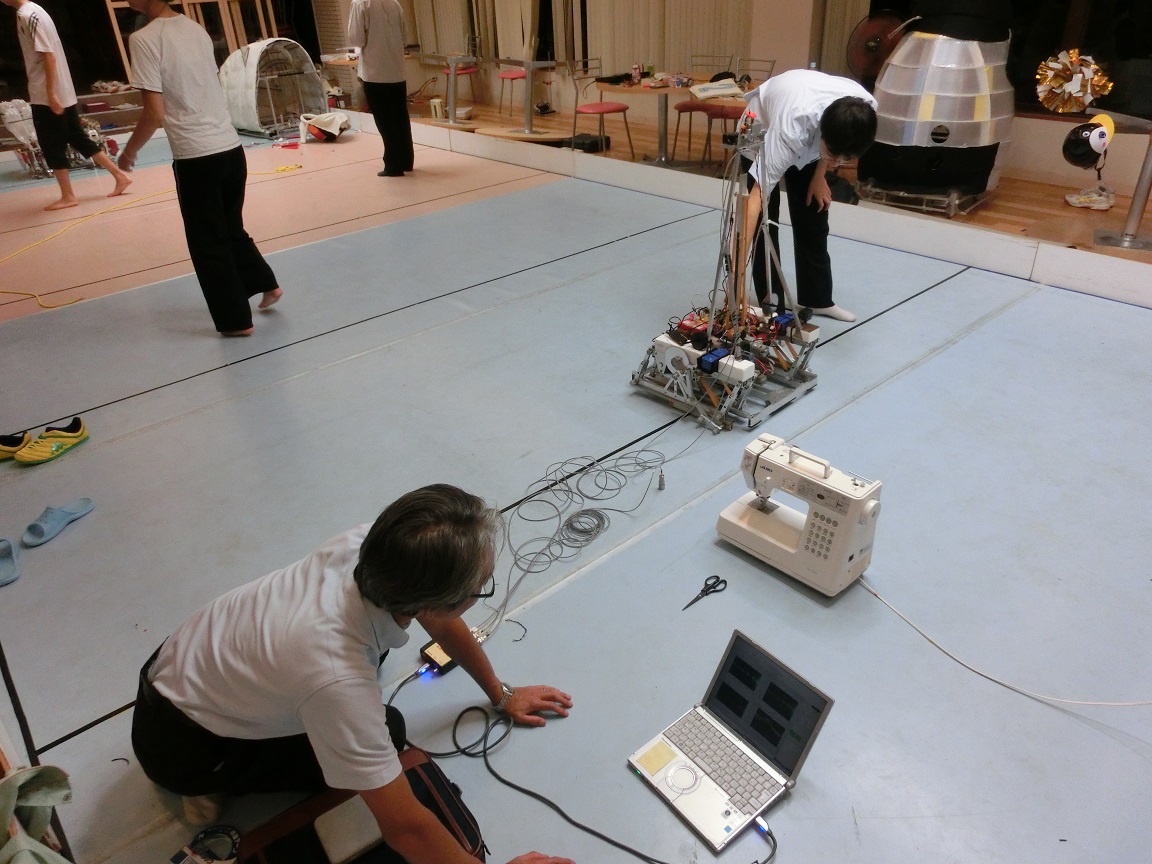
チアリーペンギン

モチーフとしたのは,チアダンスで, みどころは人とロボットの連続ジャンプです.
ジャンパーとジャンパーロボットは縄を同時に飛べませんが,ジャンパーに続けてジャンパーロボットが縄に入ります.
ジャンパーとジャンパーロボットはジャンプするときに,腕を動かし,同じ振り付けをさせることでチアダンスらしさを演出しました.
「Shall we jump」という競技名の通り,一緒に大縄跳びをしているような雰囲気を出しました.


- ジャンパーロボット「アプリコット」
-

外装はデフォルメされたペンギンで愛らしさを表現しました.
ジャンパーの姿を見て,続けて縄に入り,ジャンパーと同じ振り付けをしながら跳びます.
ペンギンらしさを表現しつつも,アクティブにジャンプする姿がみどころです. -
-
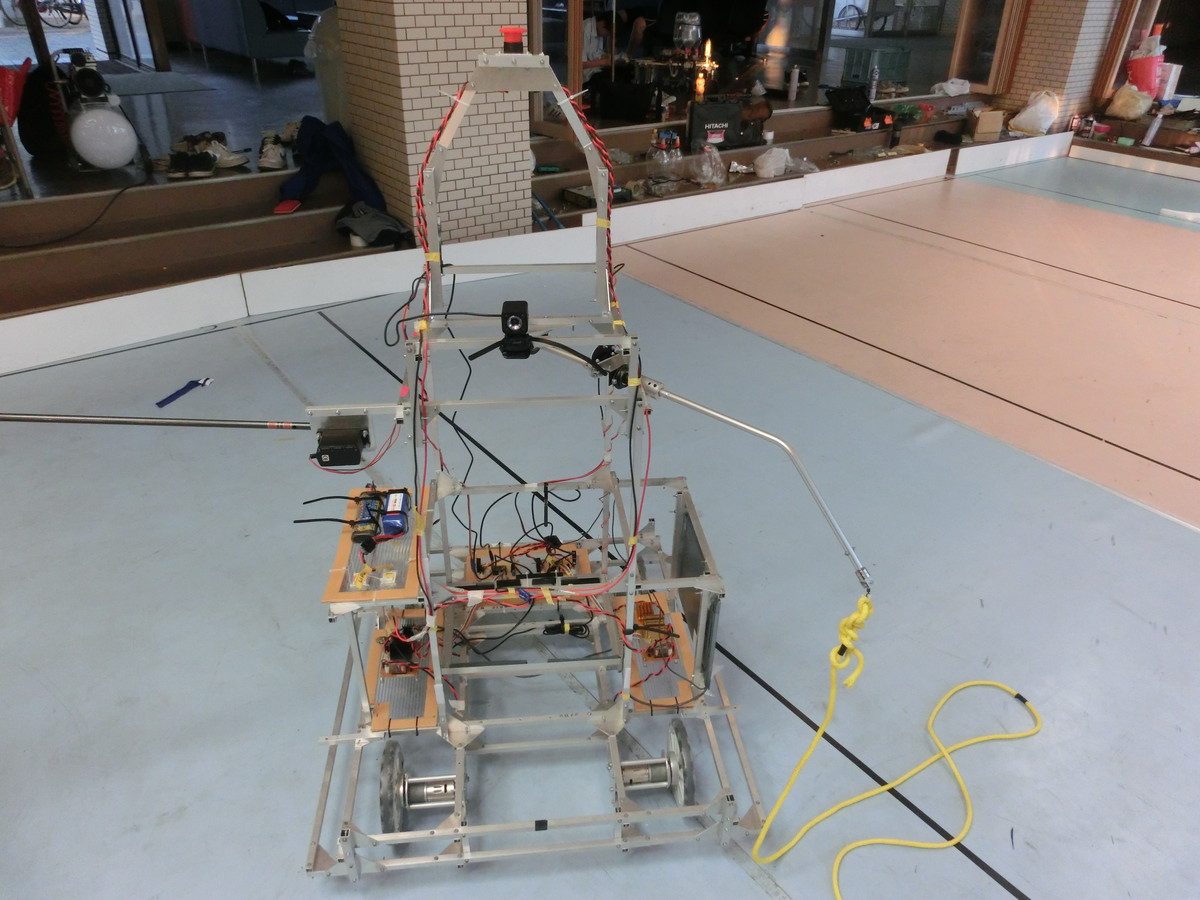
歩行機構とジャンプ機構 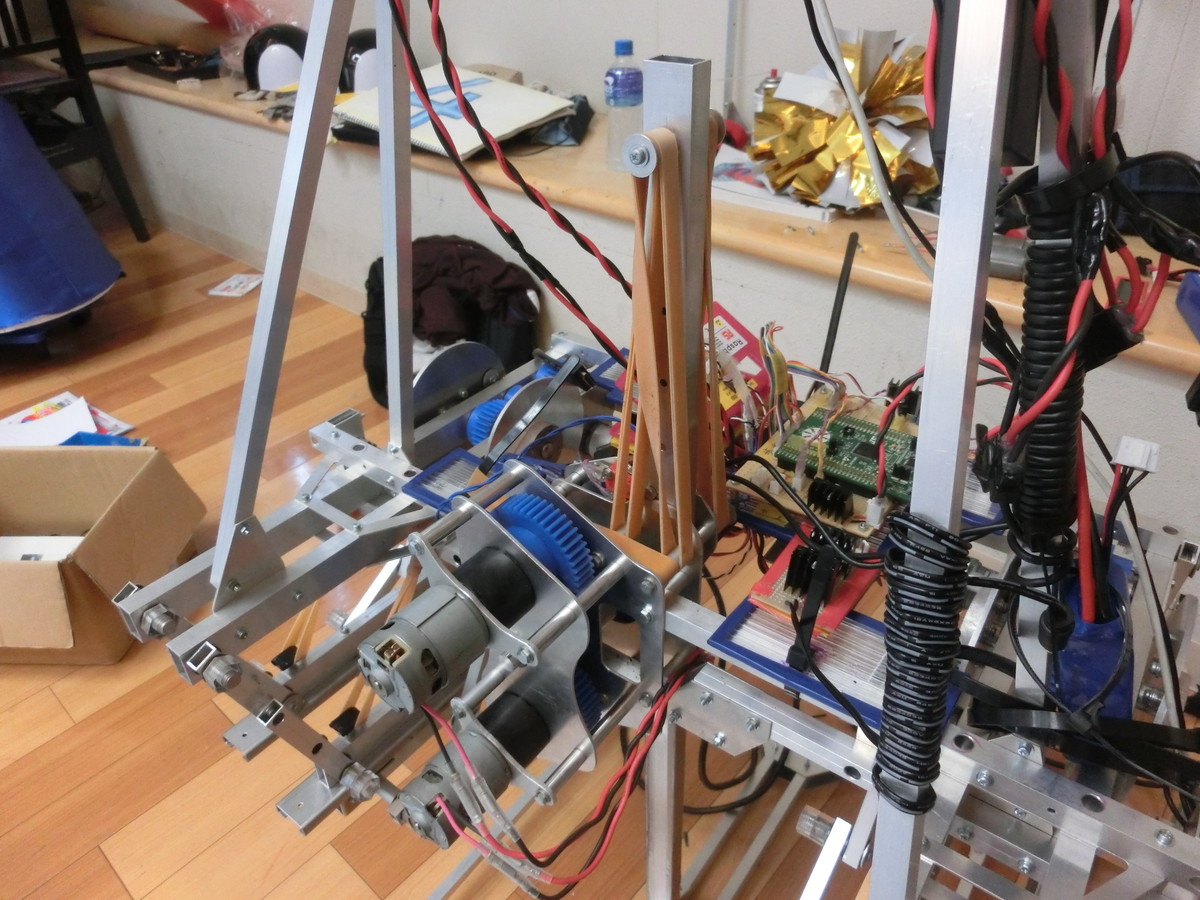
カムとクランクを使った2足歩行機構を左右対称に配置させ4足歩行機構にさせています.
ジャンプ機構には電磁クラッチを使い任意のタイミングでジャンプできるようにさせています.
軽量化のため,板や丸棒にマグネシウムを初採用しました.
しかし,コストの増加,曲げ加工の難しさなど課題も残しました. -
回路 
マイコンには,初採用となるSTM32 F3 Discoveryを採用し,IDEはIAR Embedded Workbench,言語はCを使用しました.
下準備なしでこのマイコンを扱ったため,開発環境を構築するところからかなり時間がかかりました.
また,ロボットの度重なる仕様変更,プログラマの経験準備不足により,回路班でも伝説級となるスパゲティコードが誕生しました.
また,後述の画像処理との連携として,Raspberry Piとシリアル通信をしました.
モータードライバ回路(MDC)は,FETの選定ミスやジャンプ機構の負荷の大きさもあり不安定でした.
それは,地区大会2回戦の悪夢につながりました.
地団太を踏む行為は,「MDCの死」を意味します.
バッテリーは,Hyperionで回路用にLiPo 3S 11.1V 45C 2600mAhを直列に2本,Raspberry Pi用にモバイルバッテリー,
モーター駆動用にLiPo 5S 18.5V 45C 2600mAhを使用しています.
回路の方が電圧が高いのは,電磁クラッチが24V仕様だったためです. -
画像認識 
PCは初採用のRaspberry Pi Type B,IDEはVC++2013,言語はC++,ライブラリはOpenCvを使用しました.
しかし,PCが力不足でタイムラグが1秒程度発生しました.
基本的には,USBカメラにマーカーを映すことで操作を行います.
マーカーの種類で,操作を変えることができます.
また,本体側面にもカメラがついておりそのカメラでは縄回しロボットから出るマーカーを認識し, 回っている縄に入るタイミングの指示をもらいます.
予想外の出来事として,ロボットの歩行の振動で,カメラを支える柱が共振し,マーカーの認識に影響を及ぼしました.
構造力学に詳しい建築社会デザイン工学科の先生をお呼びして,調べてもらいました.
ただ,地区大会まで時間もなく手の施しようがありませんでした.
-
{kind=link}
- 縄回しロボット「ペンタポン」
-

人と一緒に縄を回し,ジャンパーロボットと同じように腕を振り,喜びを表現しました.
ただ,縄を回すだけのロボットではなく,チームのメンバーであることを意識して作りました. -
-
移動方法 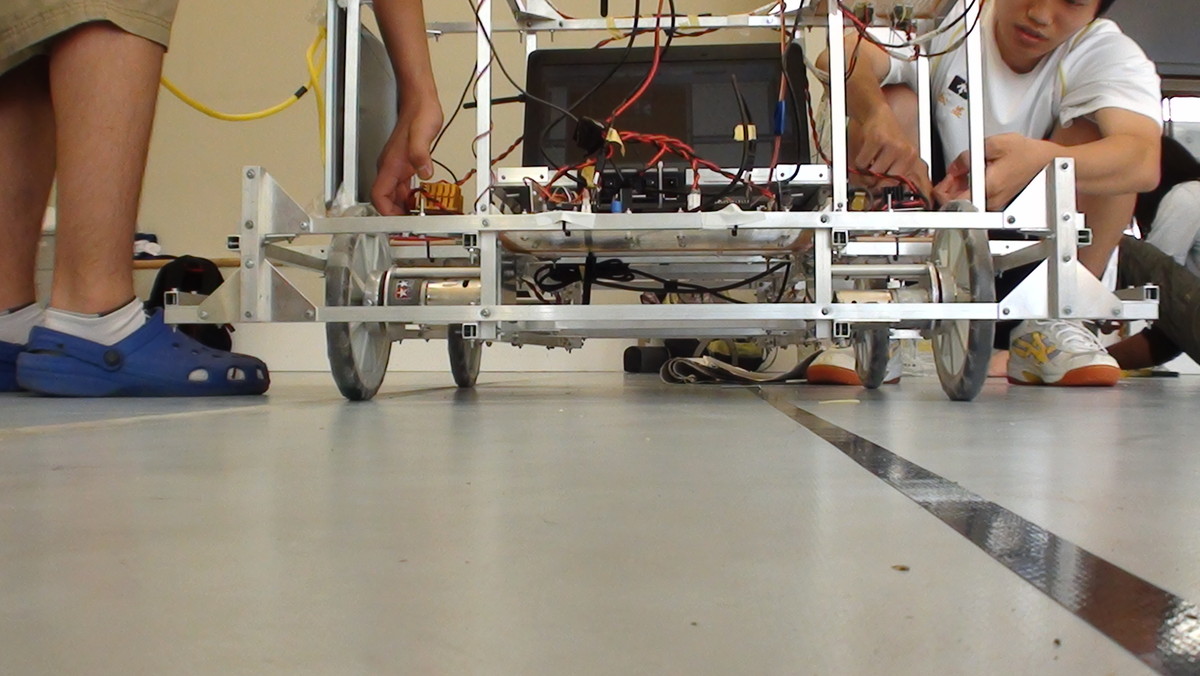
4輪駆動のタイヤ方式で全てのタイヤにモーターがついています.
操作はマーカーを使ってカメラに画像認識させて前進後退などの指示を行います. -
ロボット間の連携 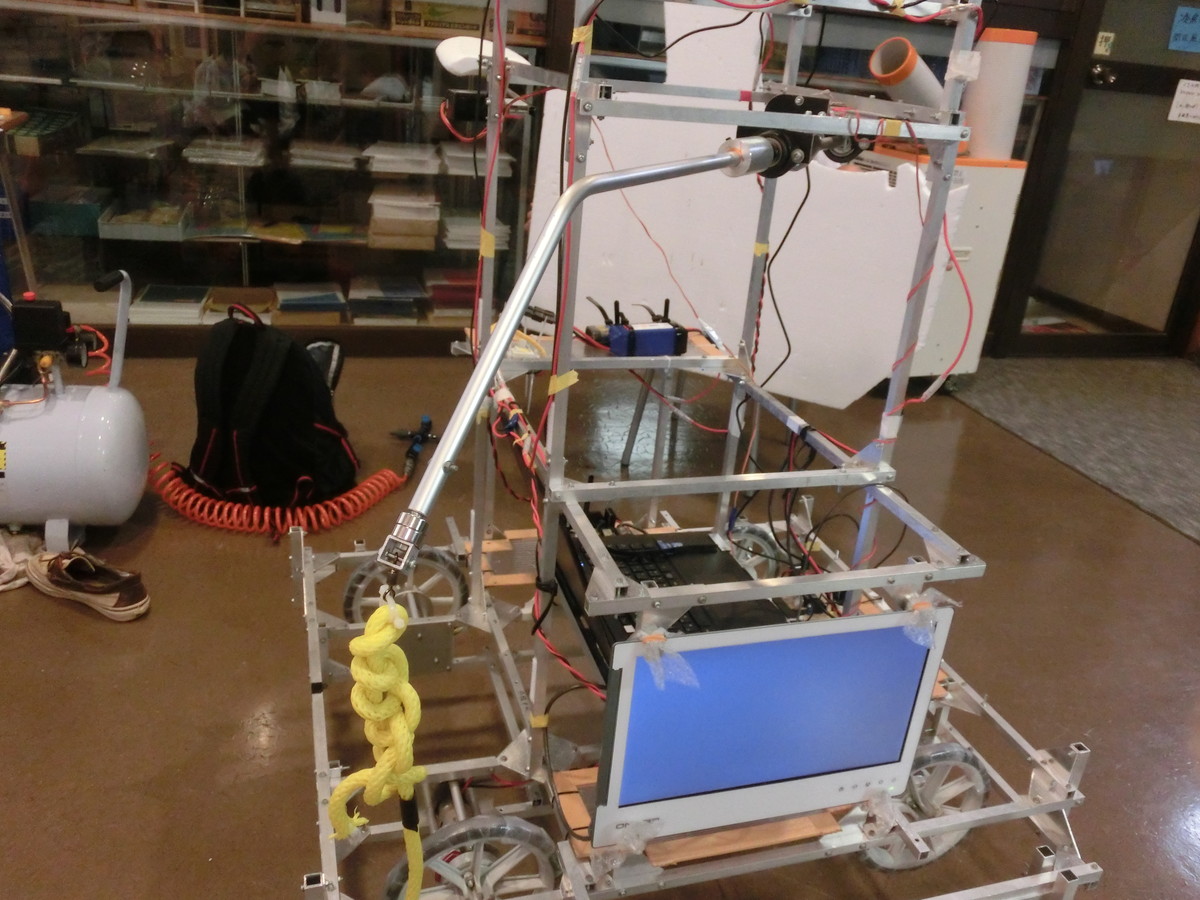
本体の右側にディスプレイがついており,そこにマーカーと呼ばれる画像を 映し出すことによってジャンパーロボットへ縄に入るタイミングの指示を出します. -
腕の角度検出 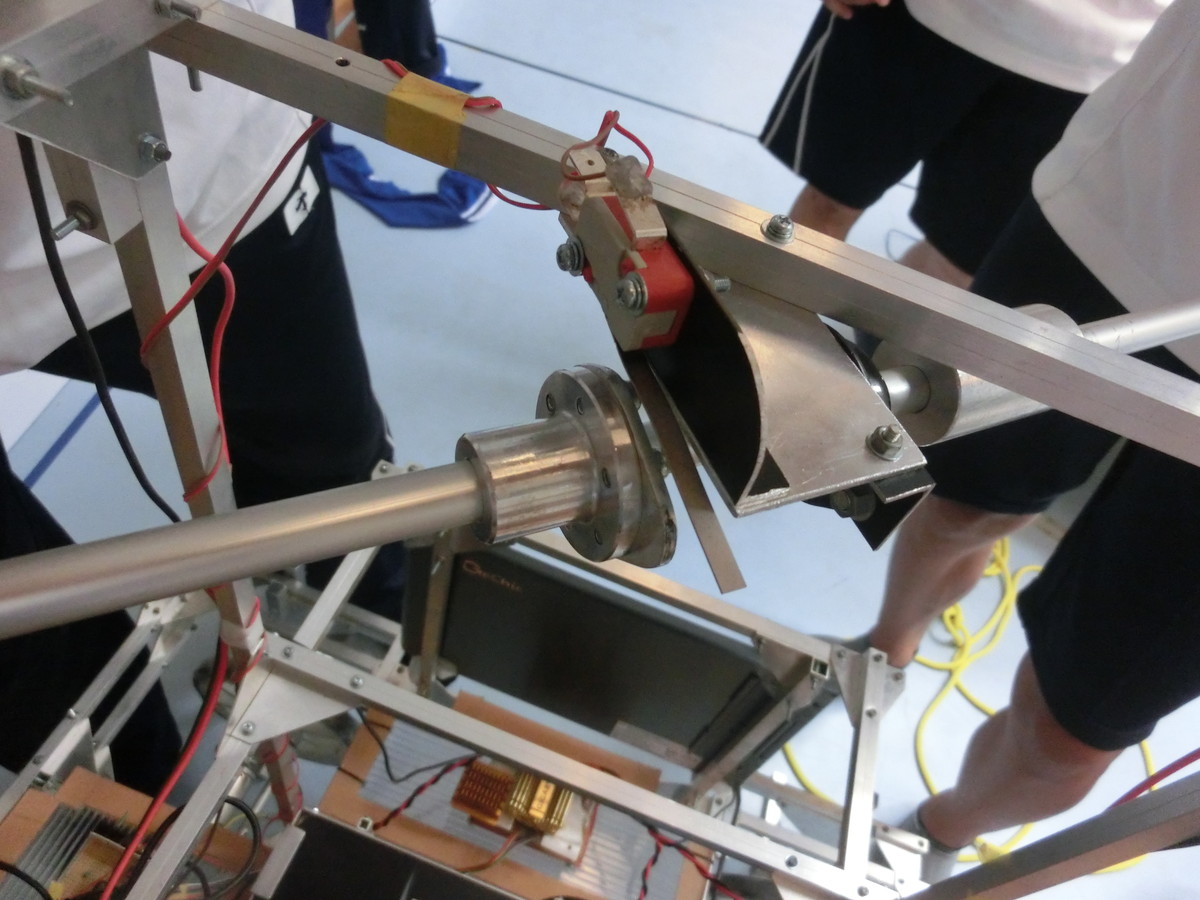
縄への進入タイミングを決めるために腕の角度を検出できるようにカムとスイッチを使っています. -
回路 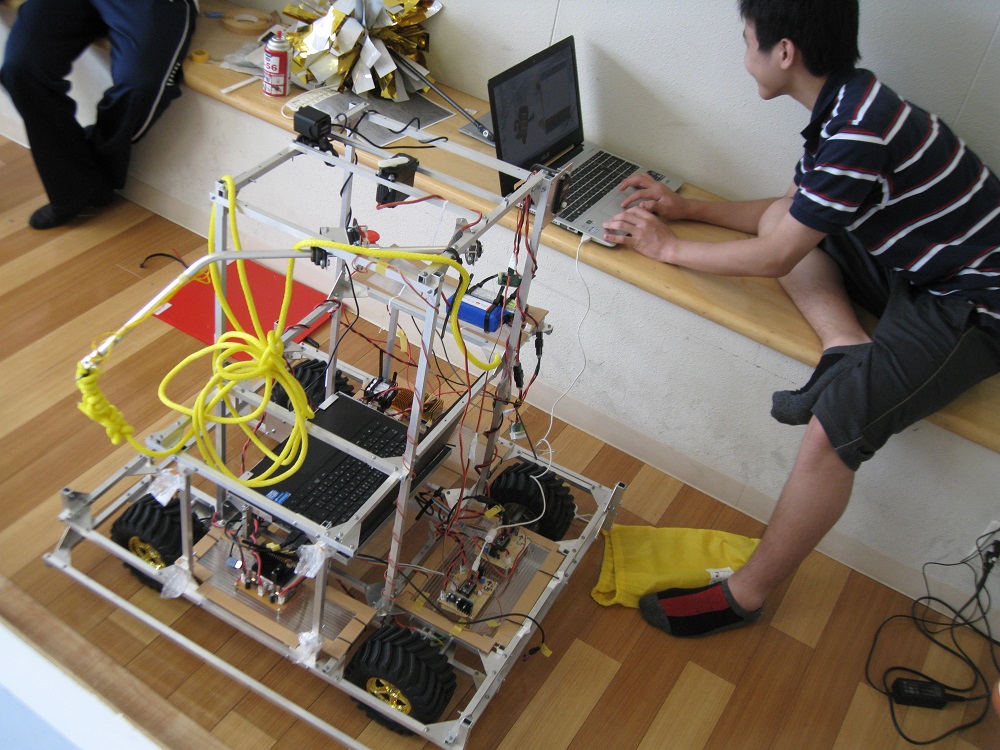
マイコンはArduino Pro Miniを2つ使用し,1年生が担当しました.
ロボットの制御の仕方が悪かったのでMDCを何度も壊してしまいました.
バッテリーは,在庫の問題で回路用にNiCd 7.2Vが1本,NiCd 12Vが1本,モーター駆動用にHyperionのLiPo 4S 14.8V 45C 2600mAhを使用しています.
-
画像認識 
2012年のハルちゃんの羊で使用したSSDのノートPCを再利用しました.
プログラムも流用したので問題なくできました.
-
-