Meme-Momo
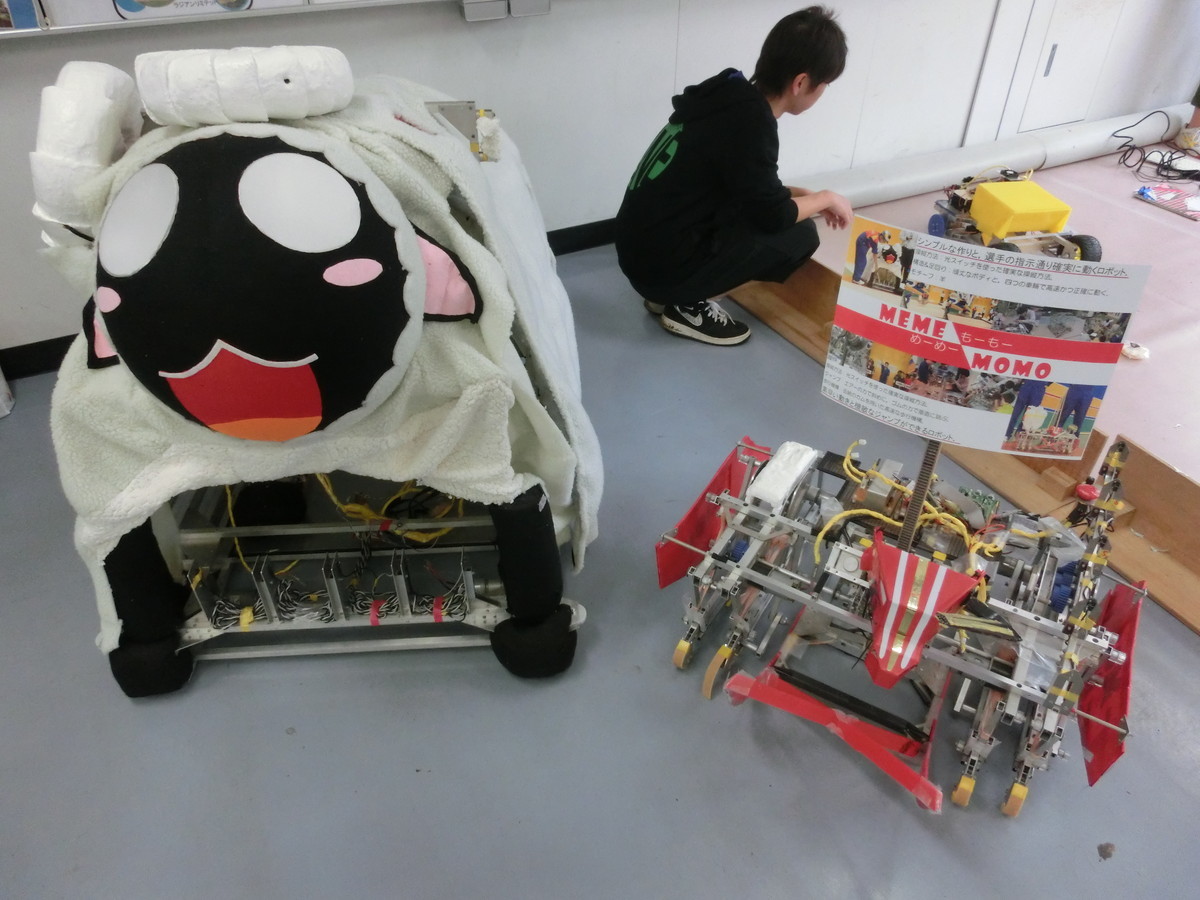
2012年の準優勝の屈辱を果たすべく,2012年の牛と羊が手を組んだという設定です
名前の由来は,モチーフとした動物の鳴き声からです.
- ジャンパーロボット
-

モチーフは「赤牛」.全国大会決勝戦再試合で敗北した怒りで,赤くなりました. -
-
足回りと操縦 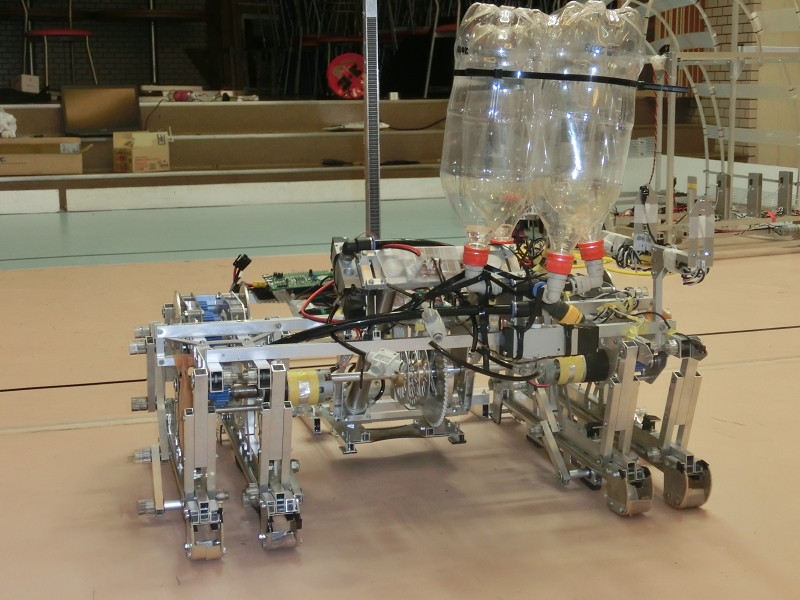
2012年の「MOOSTAR」の歩行機構の改良版で,カムの形やリンク比を変更しています.
2012年より小型・軽量化のため,様々な工夫がなされています.
基本的な操縦方法は,2012年と同じ様にセンサーを使用しています.
ジャンプの衝撃対策も念入りに行われています. -
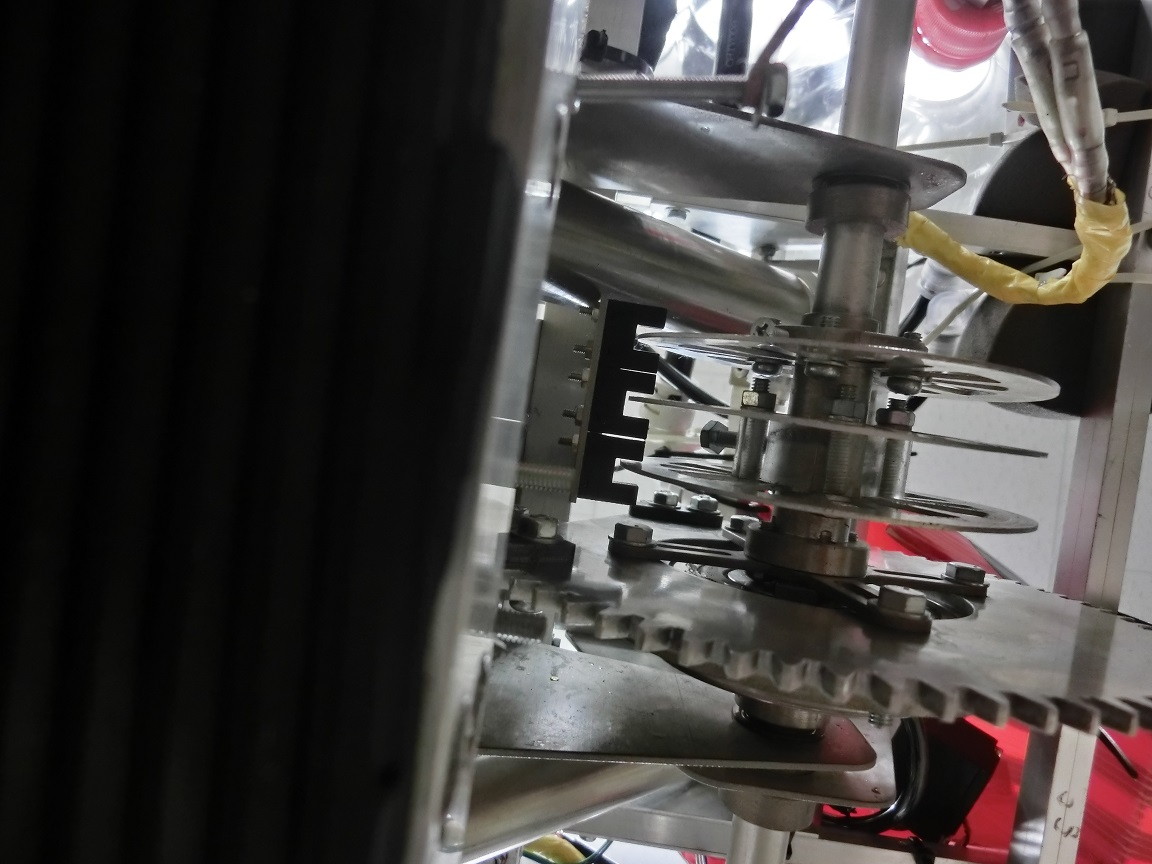
ジャンプ機構 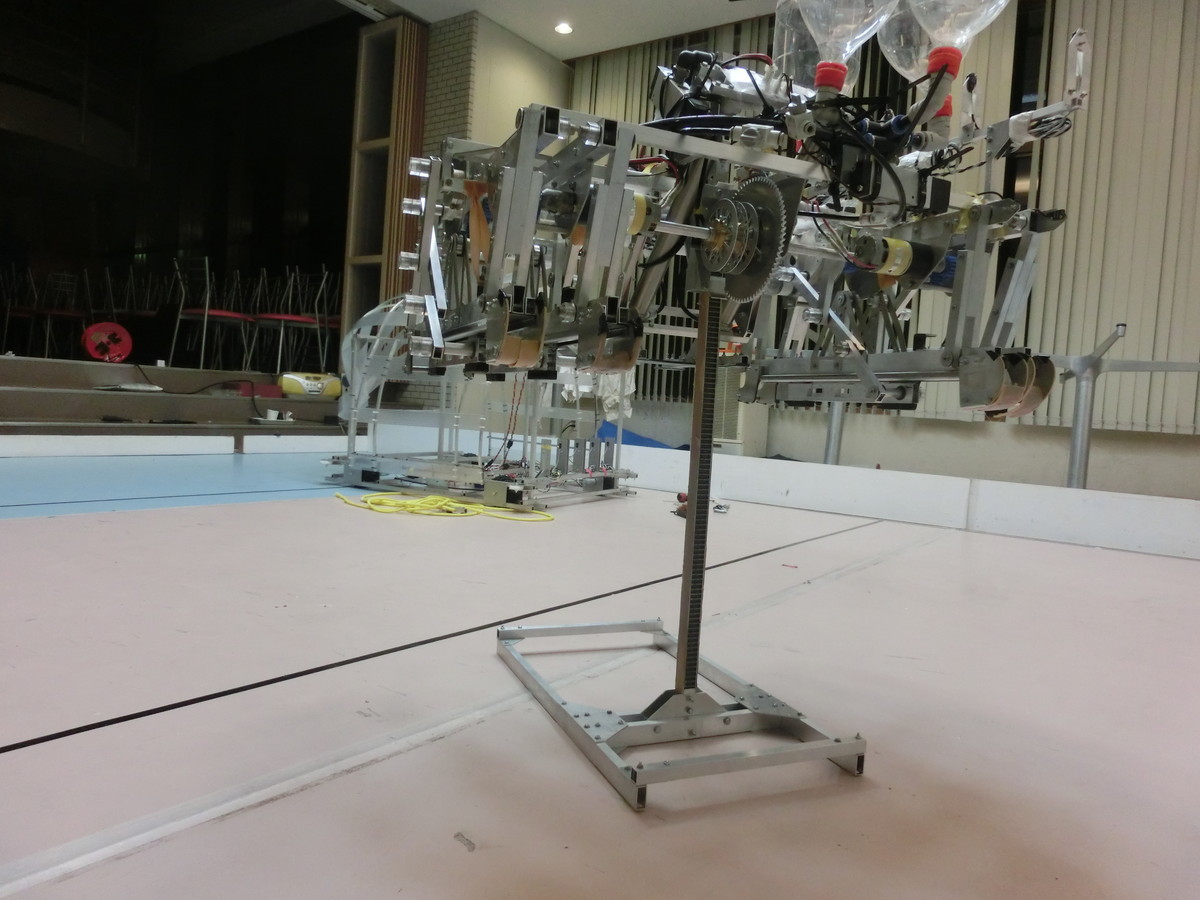
全国でも珍しく,跳ぶ方向によってジャンプ方法が異なります.
垂直方向へのジャンプは,モーターとゴムのエネルギーで行います.
中央に見えるラックは,実習工場で製作したものです. 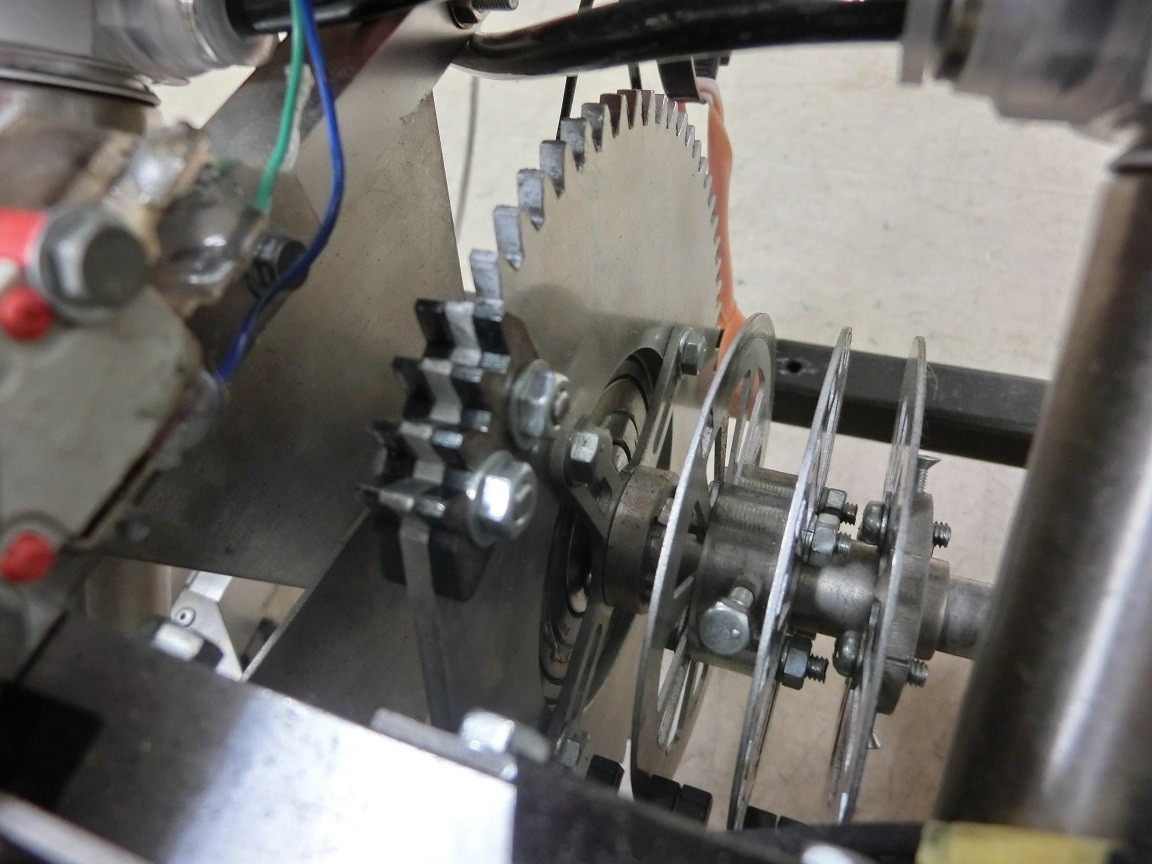
自作の欠歯車を製作しましたが,あまりの衝撃のためか歯が欠けることがしばしばあり,一部爪を装着しています. 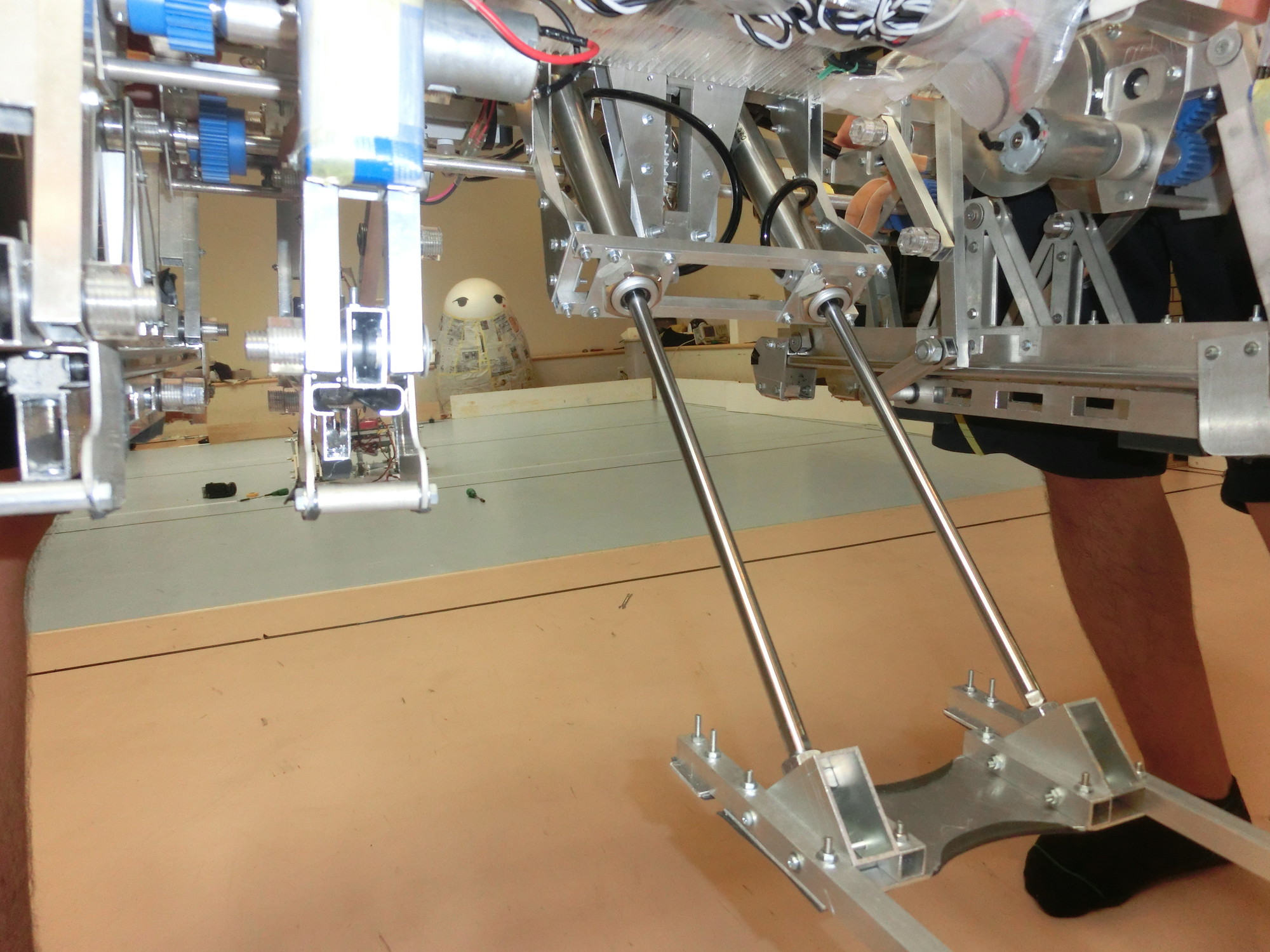
進行方向へのジャンプは,大型のエアーシリンダーを用いて行っています. -
回路 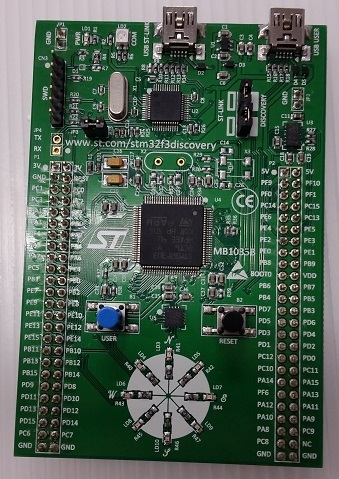
マイコンには,初採用となるSTM32 F3 Discoveryを採用し,IDEはIAR Embedded Workbench,言語はCを使用しました.
下準備なしでこのマイコンを扱ったため,開発環境を構築するところからかなり時間がかかりました.
モータードライバ回路(MDC)は,FETの選定ミスやジャンプ機構の負荷の大きさもあり不安定でした.
冷却を頑張ったため,どうにか持ちこたえたようです.
ロータリーエンコーダは,マイクロフォトセンサに自作のスリットを組み合わせました.
ロータリーエンコーダ自体初めて使用したため,こちらも苦戦しました.
バッテリーは,回路用にHyperion LiPo 3S 11.1V 45C 1100mAh,
モーター駆動用にHyperion LiPo 5S 18.5V 45C 2600mAhを使用しています.
-
-


- 縄回しロボット
-

モチーフは「赤牛」.全国大会決勝戦再試合で敗北した怒りで,赤くなりました. -
-
足回りと操縦 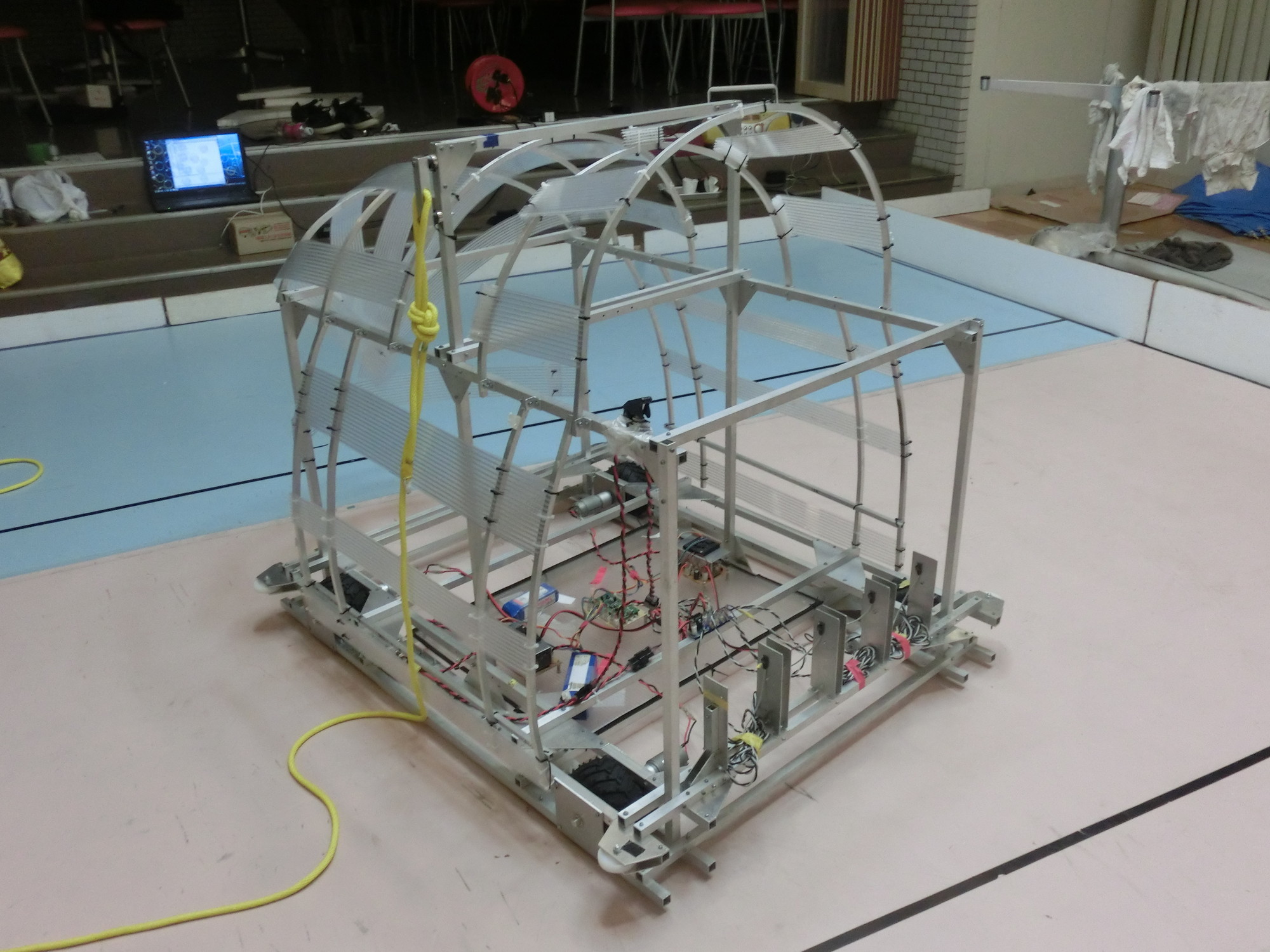
2012年と同じセンサーを使用して操縦しており,4輪駆動によって前後方向にスムーズに動きます.
フィールド側面と常に平行に進めるようにしています. -
外装 
布地や顔の表情などにも拘っています.
会場は明るいのであまり目立ちませんが,写真のように,ロボットの目が青や赤に光ります. -
回路
マイコンには,初採用となるSTM32 F3 Discoveryを採用し,IDEはIAR Embedded Workbench,言語はCを使用しました.
下準備なしでこのマイコンを扱ったため,開発環境を構築するところからかなり時間がかかりました.
バッテリーは,在庫の都合で回路用にNiCd 12V,モーター駆動用にHyperionでLiPo 5S 18.5V 45C 2600mAhを使用しています.
-