ハルちゃんの羊
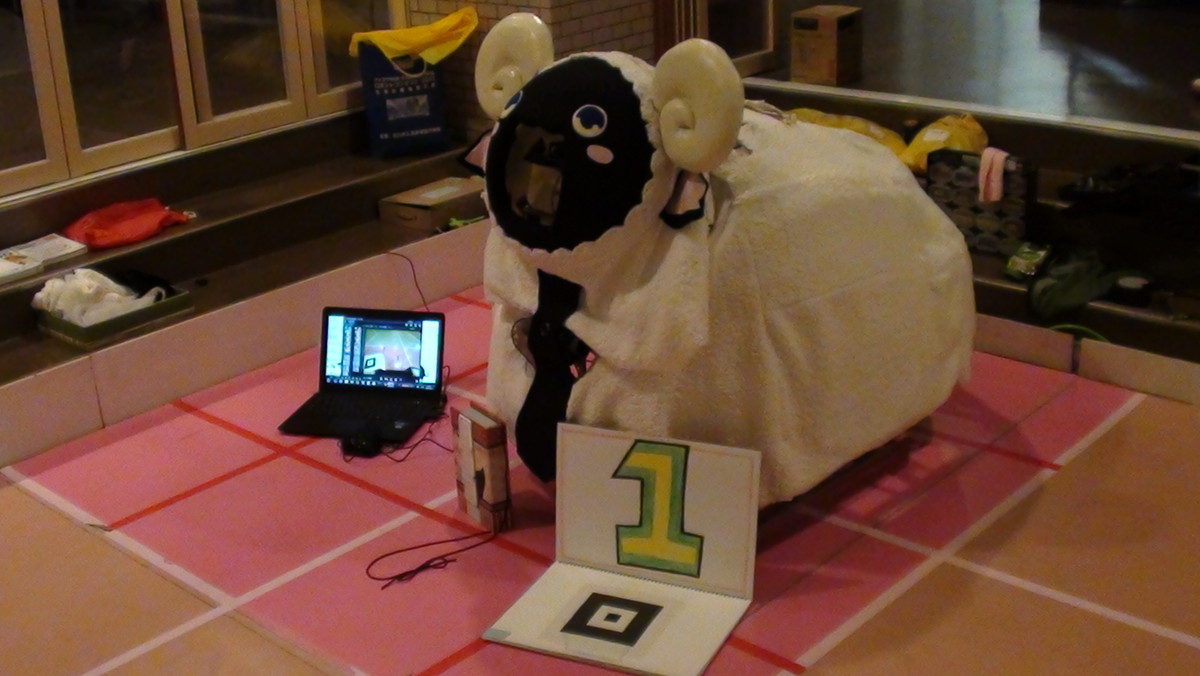 伴走者に仕える有能な執事的羊ロボットです.
伴走者に仕える有能な執事的羊ロボットです.
- ◎試合の大まかな流れと見所◎
- 試合の大まかな流れとしては,
- 羊ロボットが自らボールを探しに行く.
- 伴走者がボールを羊ロボットに渡す.
- 羊ロボットがボールをゴールへ入れに行く.
- また伴走者のもとに行き,ボールを渡してもらう.
- 制限時間まで3と4を繰り返す となります.
その過程の中でペットらしさを重視した動きを表現させました.
お嬢様と執事(羊)が協力して 競技課題をクリアする姿が見所です.
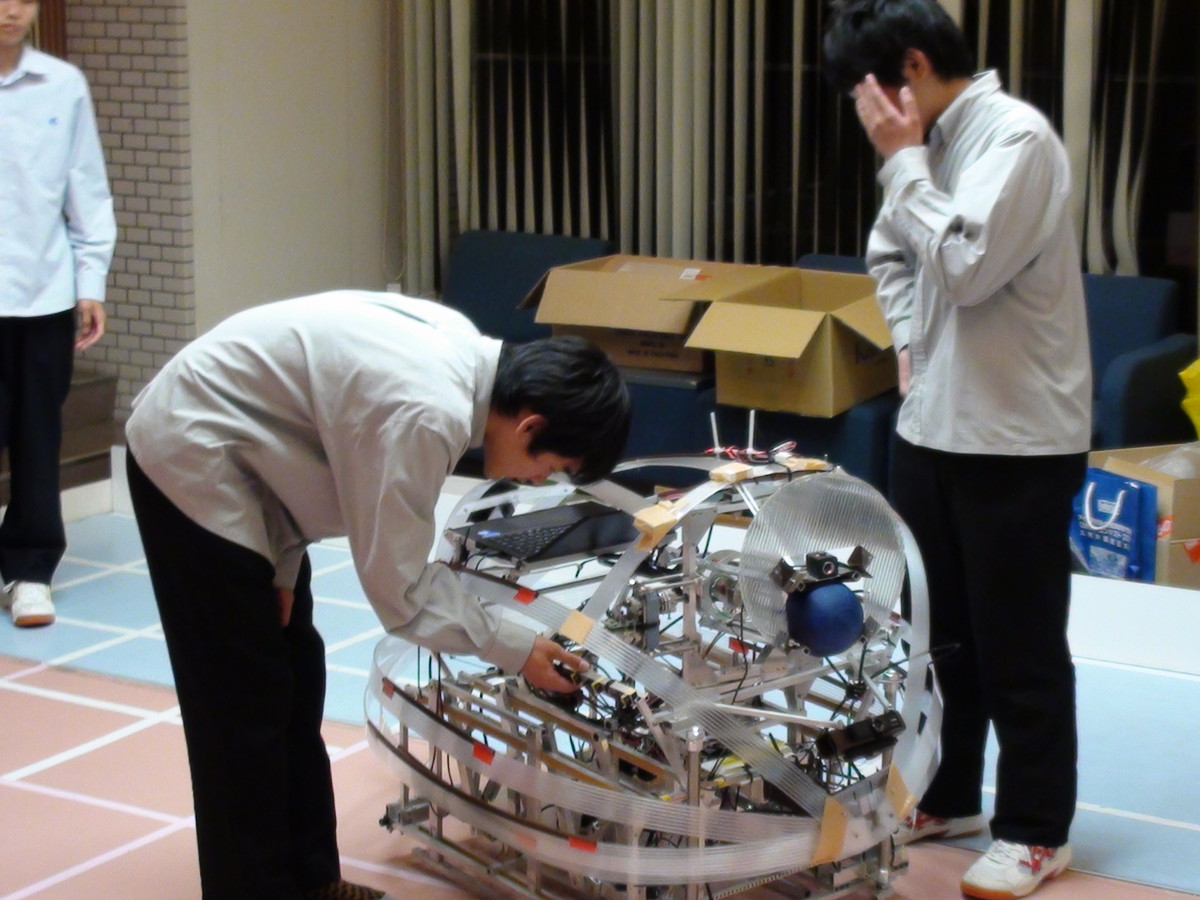
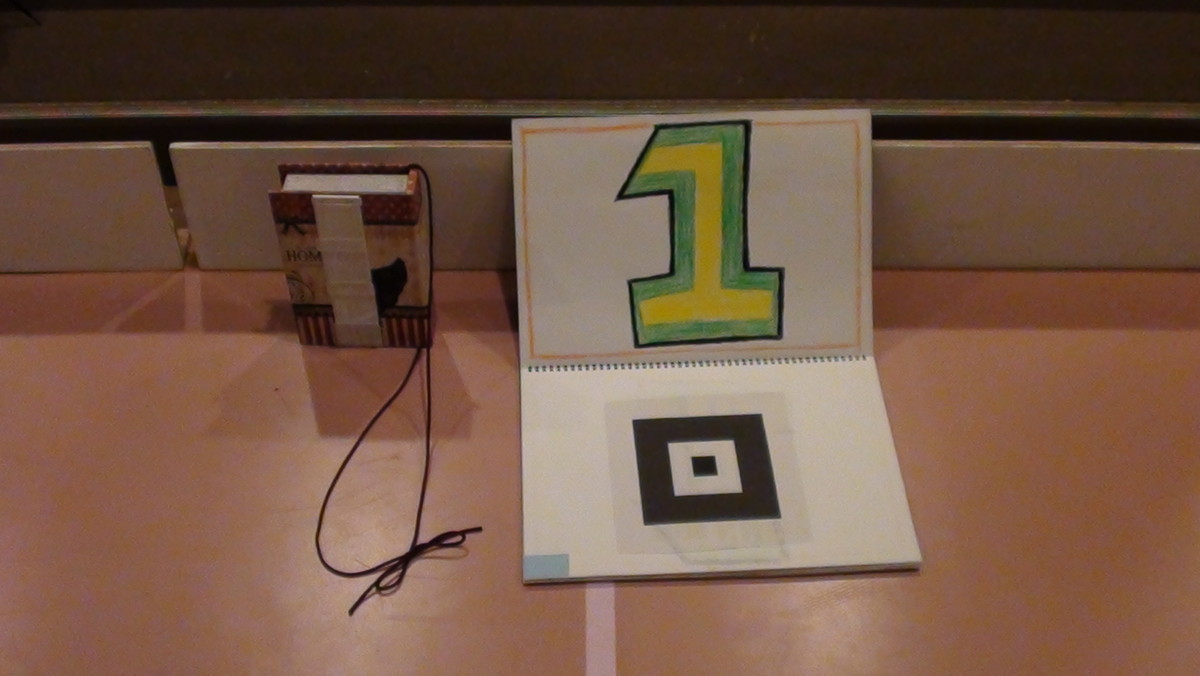
- カメラでマーカーという画像を見せて指示をだし,操作するロボットです.
- 首の下についているもう一つのカメラで床に転がっているボールを探し,ボールを見つけたらそこで停止します.(正確にはボールが見つかるまでランダムに歩き回るんです)
- チェビシェフリンク機構と呼ばれる機構で二足歩行機構を作り,それを左右対称に配置することにより四足歩行をさせています.
- ボールを拾ってから自動でゴールまで行くために回帰反射センサーというレーザーセンサーで,あらかじめゴール前に置いてあった反射板を目印にゴールへ向かいます.
また,細かい個所について,
- 足回りを制御するH8/3687と首周りの制御をするArduino Pro Miniを使い分けています.
- H8は2年生が担当し,Arduinoは1年生が担当しました.
- 光電センサーで発射機構の向きを主導で微調整できます.
- バッテリーは,回路用にHyperion LiPo 3S 11.1V 45C 2600mAh,モーター駆動用にHyperion LiPo 4S 14.8V 45C 2600mAhを使用しています.
- お座り状態から口にボールを入れると,センサーで検出し,サーボモータを使って尻尾を振ります.
- ARToolKitは動作が重いという理由で採用されず,自作のライブラリ的なものを作成したそうです.
- 大会後ですが,カメラでゴールの穴を検出し,そこに照準を合わせるプログラムも追加しています.
-