ラジアンリミテッド
{kind=link}
また,「アンリミテッド」にかけて限界のないという意味も持ち合わせています.
- ◎オフェンス・ロボット◎
-
華麗にディフェンス・ロボットをかわし,レシーバーがキャッチします. -
-
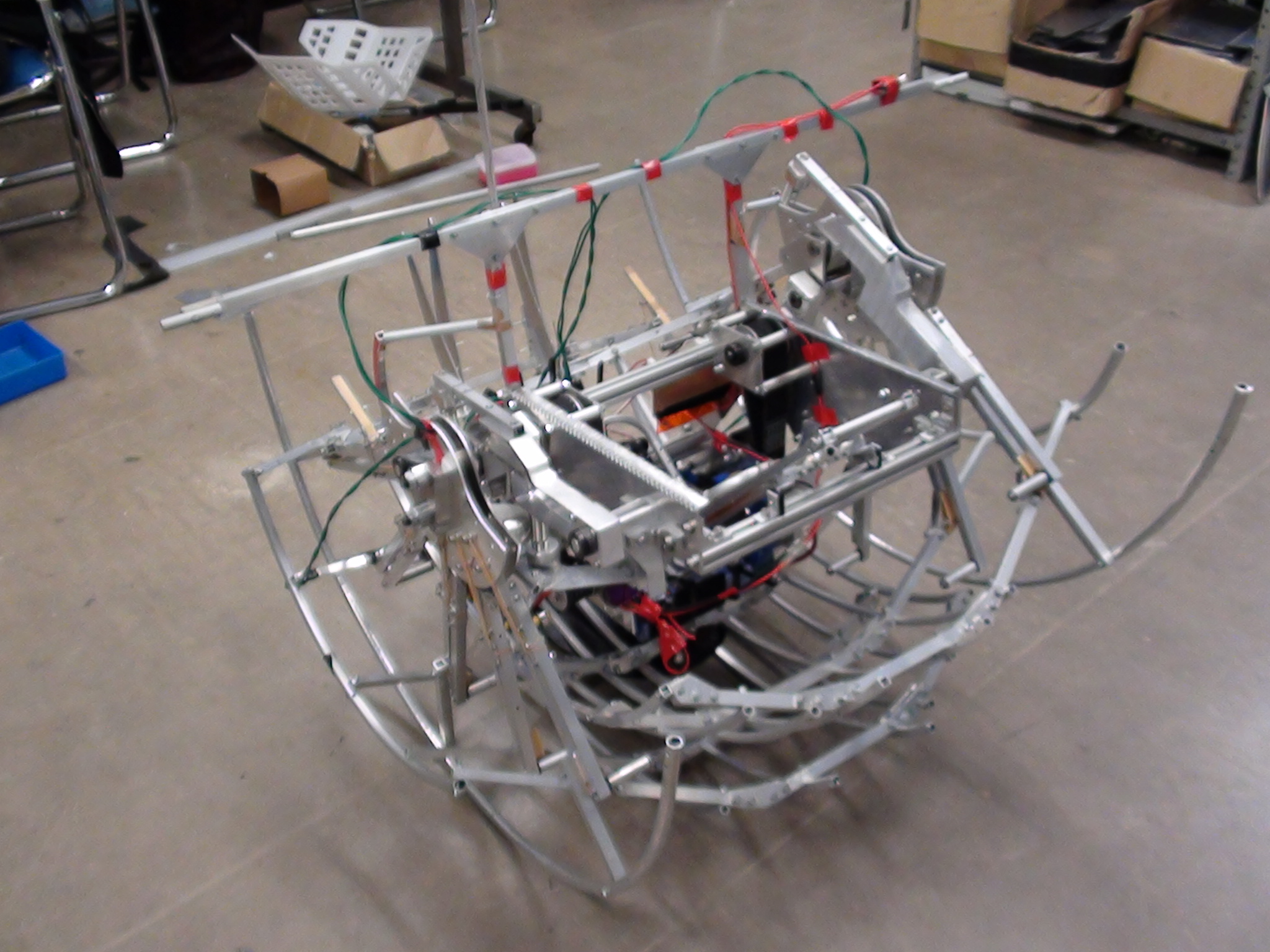
歩行メカニズム 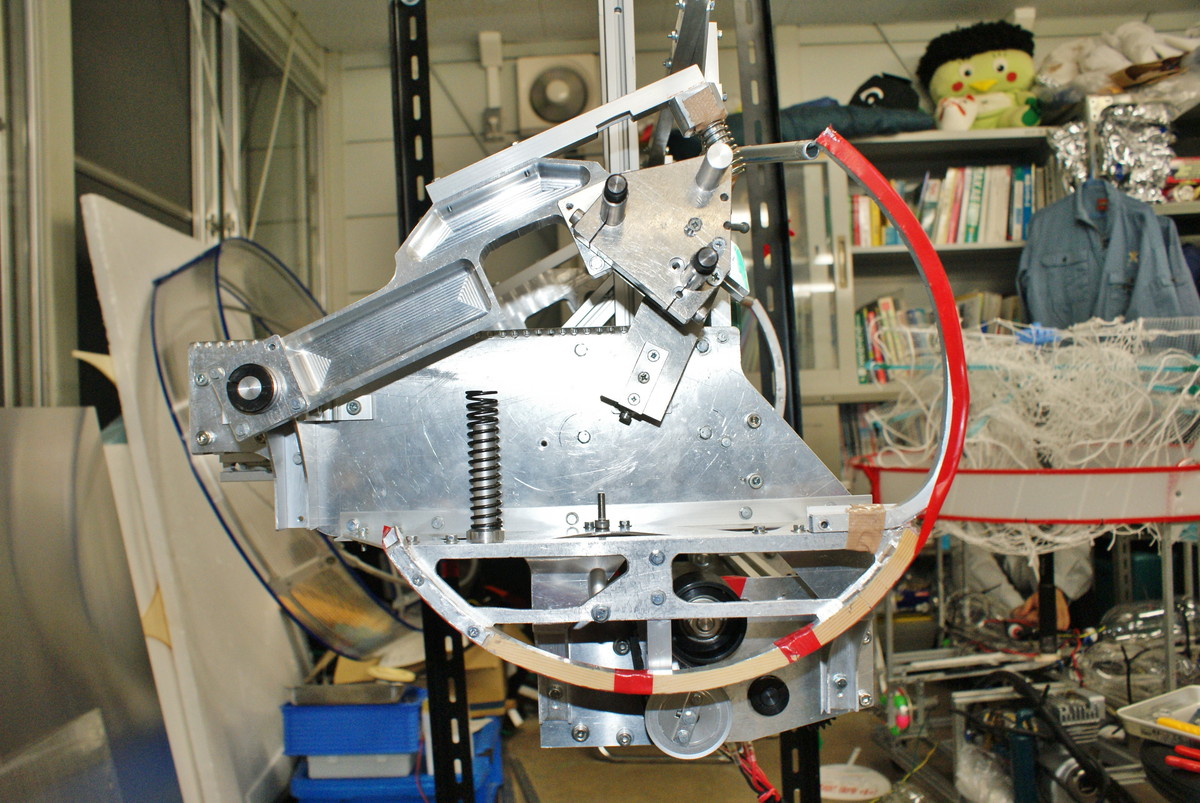
2010年の「RADIAN」同様ヘッケンリンク機構を利用しており, この機構によってきれいな円軌道と脚を持ち上げるための楕円軌道を生成することが出来ます.
この機構と円弧状の脚部を組み合わせることにより,大きな歩幅でタイヤが転がるように歩行します.
リンクの一部をマシニングセンタで削り出したので凄く綺麗です.
サイズを大きくしたために,昨年同様特異点の問題のほか,脚部がたわんで干渉するなどの問題が多くあり,直前まで調整に苦労しました. -
転倒防止 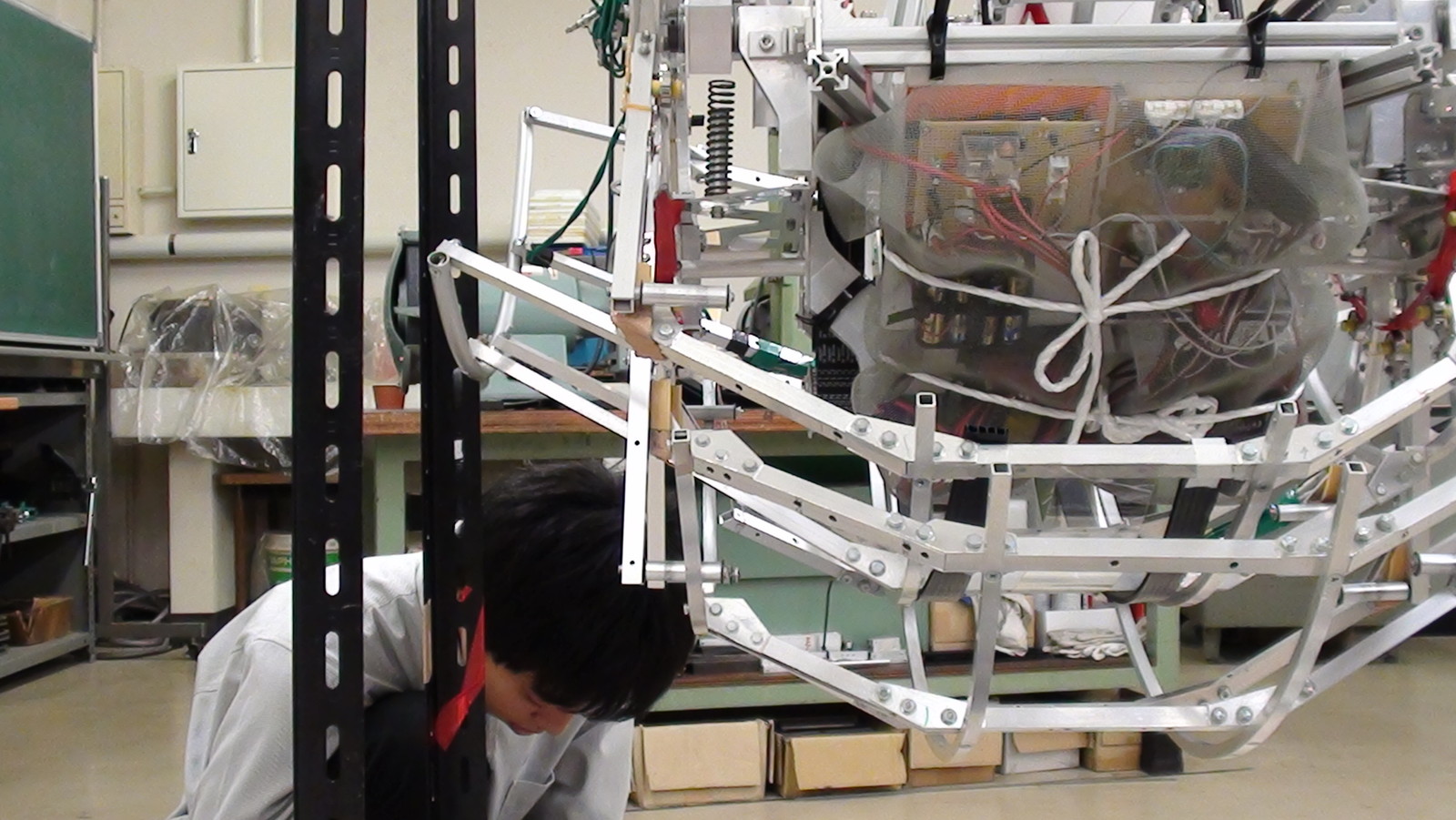
2010年同様,バッテリー・回路・モーターなどのパーツをなるべく本体下方に配置し,低重心化してあります.
そのため多少揺れてもダルマのように転ぶことなく歩行出来ます. -
旋回機構 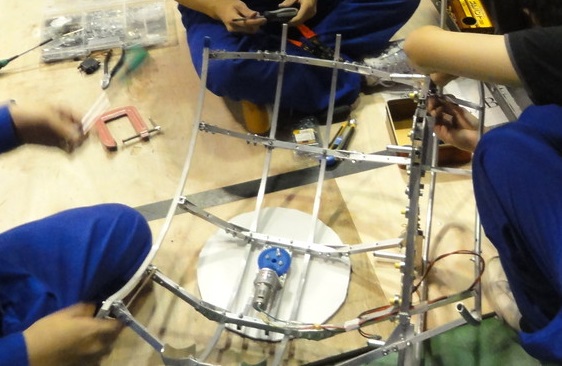
今回は競技上,旋回が必要となるため,足裏に旋回版を取り付けました.
こいつが曲者で,脚部が円弧状でかつ動くので,いかに薄く,軽くできるかと苦労しました. -
バンパー 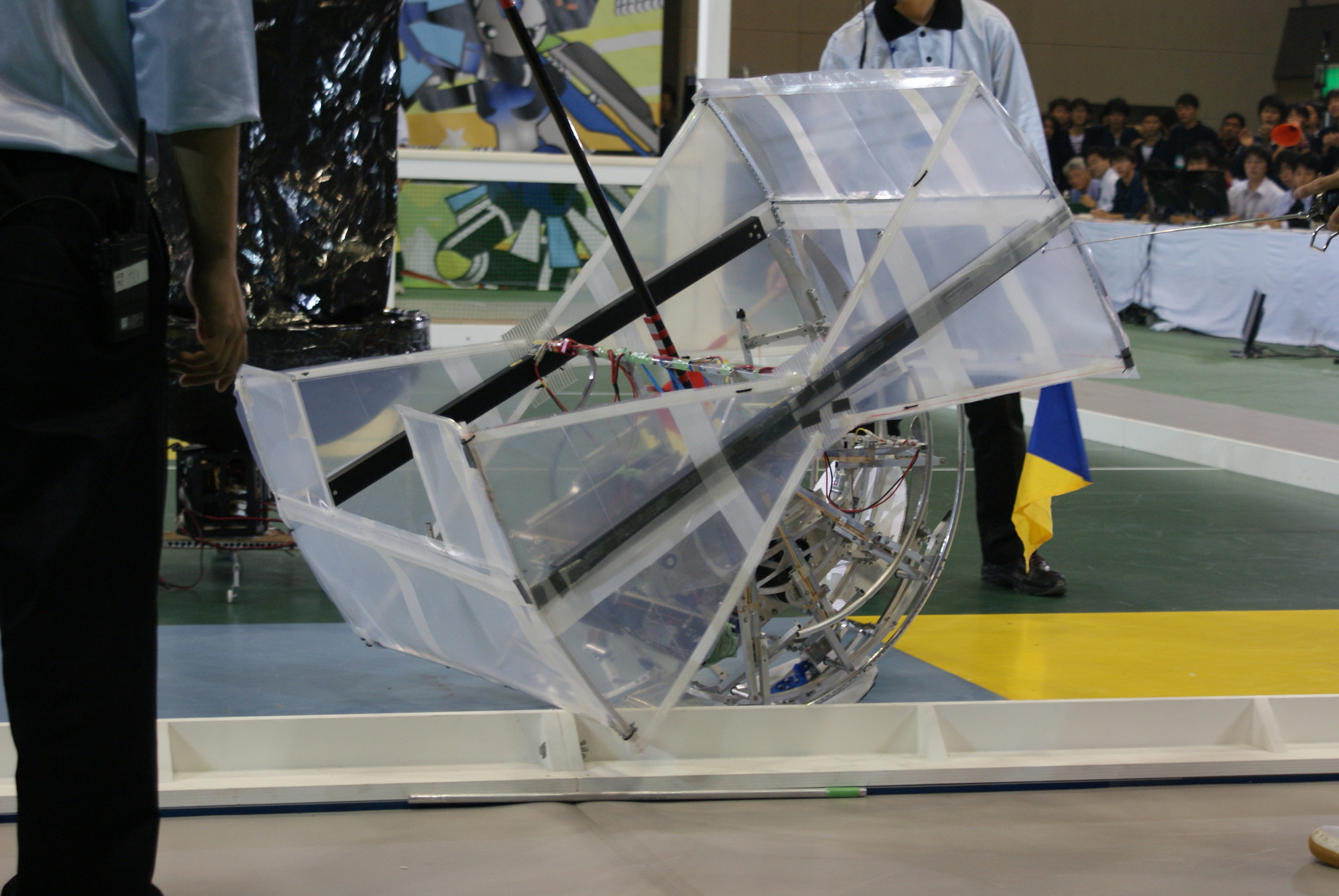
高さ制限のルールでは,常に床と水平に一定距離をとる必要がありました.
しかし,歩行方法上本体が前後に揺れるので,前後の揺れの分をカバーする為にバンパーは砂時計型になっています. -
投球機構 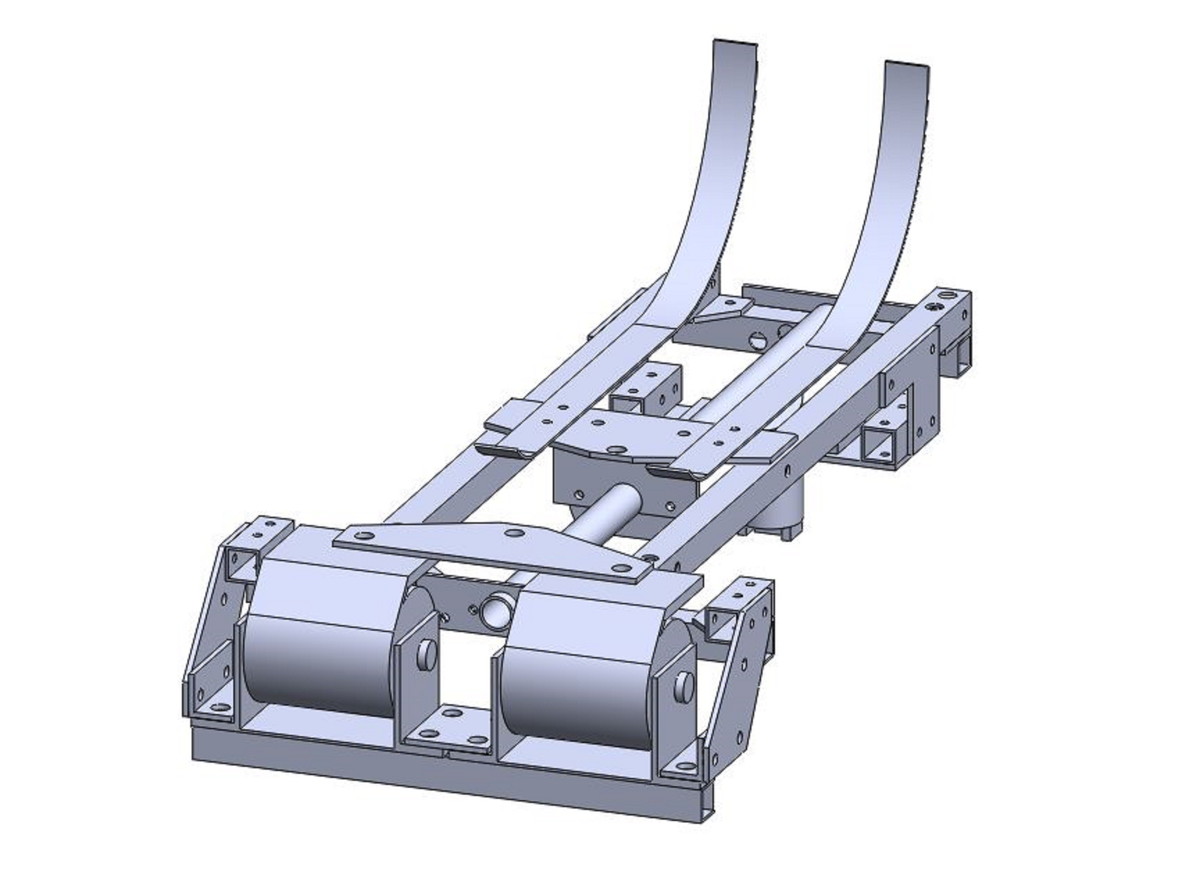
捕球したボールをレール上の発射台に置き,発射台をオーバンドの輪ゴムによって溜めたエネルギーを利用し,ボールを発射します.
難点としては捕球のための装置がないため,捕球しにくいことで,飛距離は5m程度です.
-
- ◎ディフェンス・ロボット◎
-

敵チームのオフェンス・ロボットが発射したボールをインターセプトします. -
-
足回り 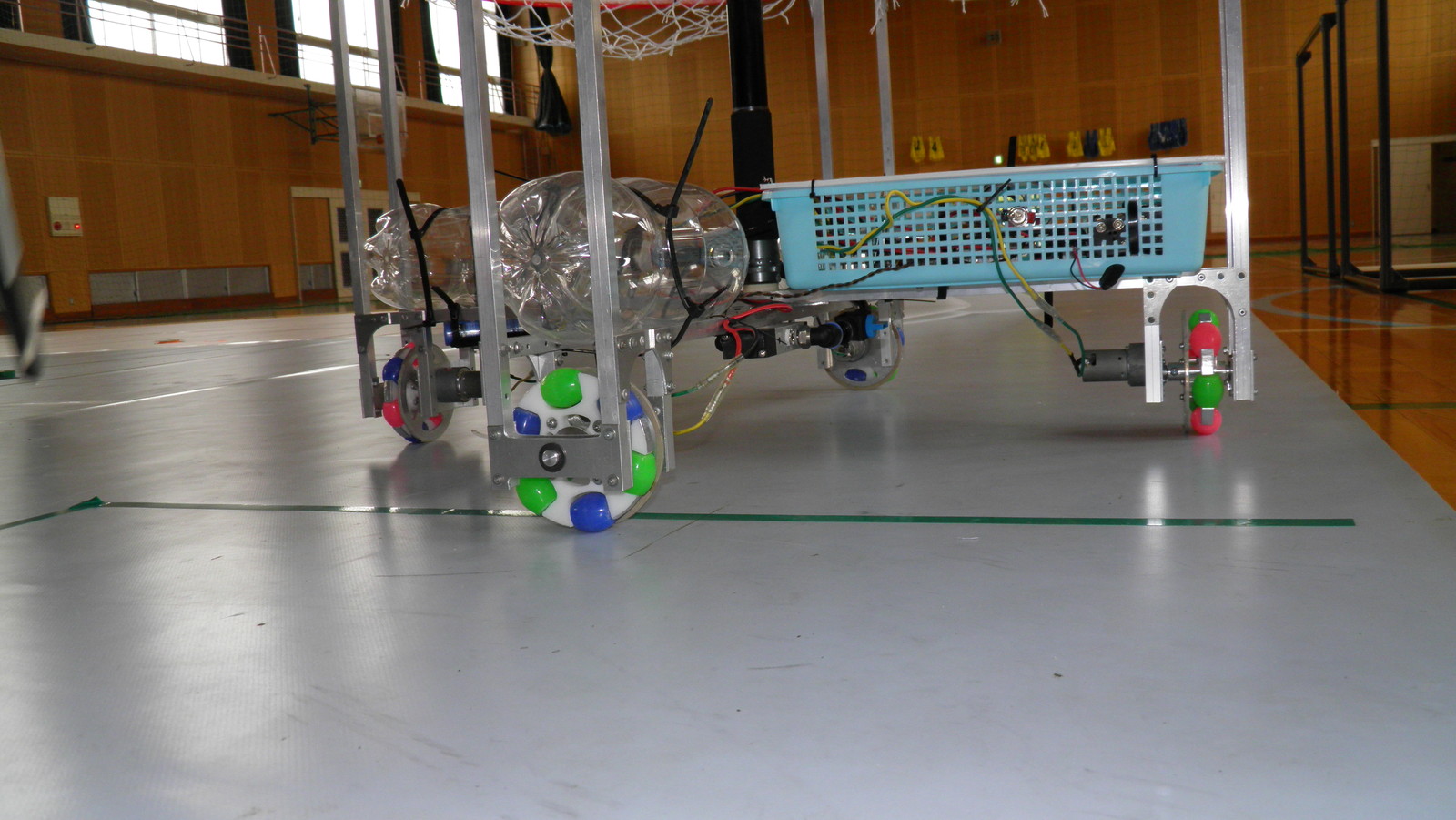
四輪のオムニホイール駆動で,全方向へスムーズに動くことが出来ます.
メインのプレートは3Dプリンター,タイヤはラグビーボール型のスーパーボールを加工して作った自作のオムニホイールを使用しています. -
ディフェンス機構 
ペットボトルに貯めた空気で釣竿を伸ばし,ディフェンス機構を展開します.展開後は3.5mほどになります.
エアー関係はノウハウがなかったので一から開発しました.
ネットの張り方も試行錯誤し,受け止めたボールを跳ね返さないように輪ゴムではなくタイラップを用いるなど細かい工夫もあります.
大会では,見事インターセプトを決めました. -
回路・プログラム 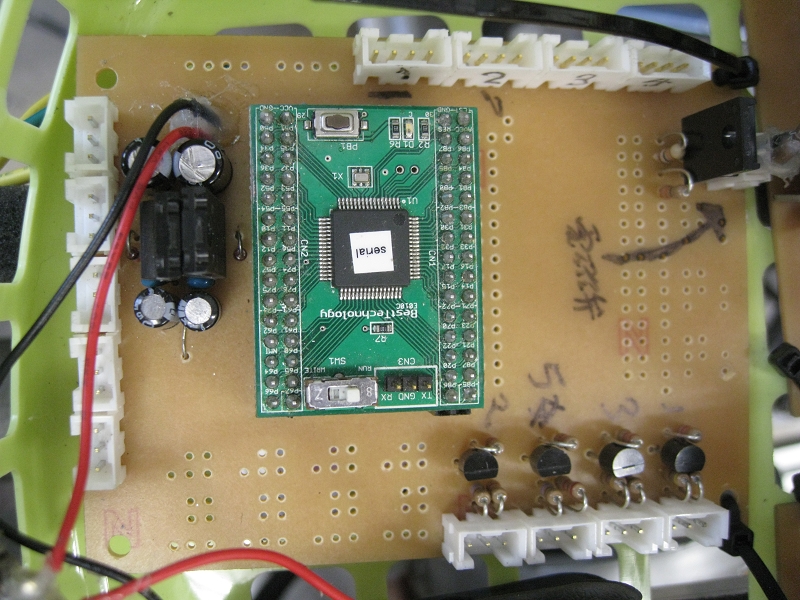
メインのマイコンはBestTechnology社のH8/3687,統合開発環境はGCC Developer Liteで言語はCです.
オフェンスロボットとディフェンスロボット2台を1名で担当していたので同一仕様です.
コントローラーは,FUTABAのラジコンプロポである送信機「T9CAP」と受信機「PCM1024」です.
このシステムを採用したのはこれが最後でした.
ちなみに初採用は2007年です.2007年以前は,赤外線やDTMF(おそらく全国で唯一?)を使用していたようです.
モータドライバ回路(MDC)は,リレーとMOSFETの組み合わせでした.
慣れないプリント基板製作で試行錯誤の連続でした.
プリント基板とフィルムの表裏をミスするなど大変でした.
発熱が心配で,熱さまシートをMOSFETのヒートシンクに張りました.
-