RADIAN
別名を「子どもゴロン」(名づけ親:fujitsu)とも「鋼鐵円型爆進兵」(名づけ親:Tsune)とも言います.
このロボット単独で旋回することはできませんがスピードだけはピカイチです!
実際に九州沖縄地区大会では,二足歩行ゾーンで最速タイムを記録し,アイデア賞も受賞しました.
- 二足歩行ロボット「RADIAN」
- 「しょぼい」「小さい」「弱そう」「赤ちゃん?」と感じる人もいると思いますが,そんなことはありません!
動き出すとスピーディーで独特な歩行をする面白いロボットです.
スピードの秘密は,ロボットのメカニズムであるヘッケンリンク機構です.
丸い形状の足で転がるように歩行することが大きな特徴です.
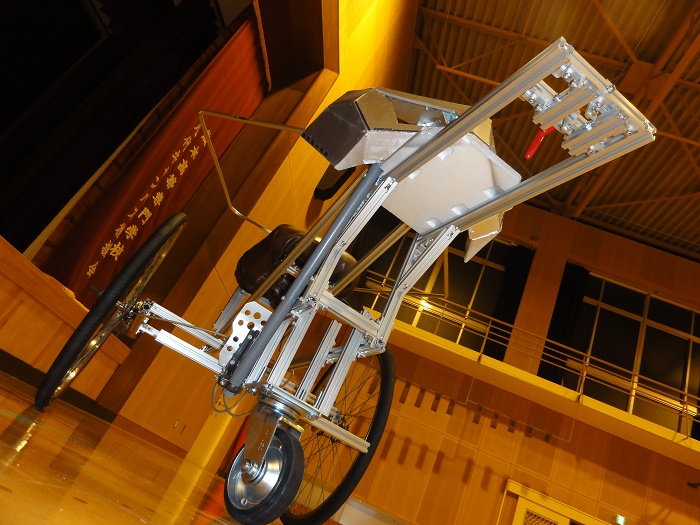
デザインは三輪車の前輪を意識しています. -
-
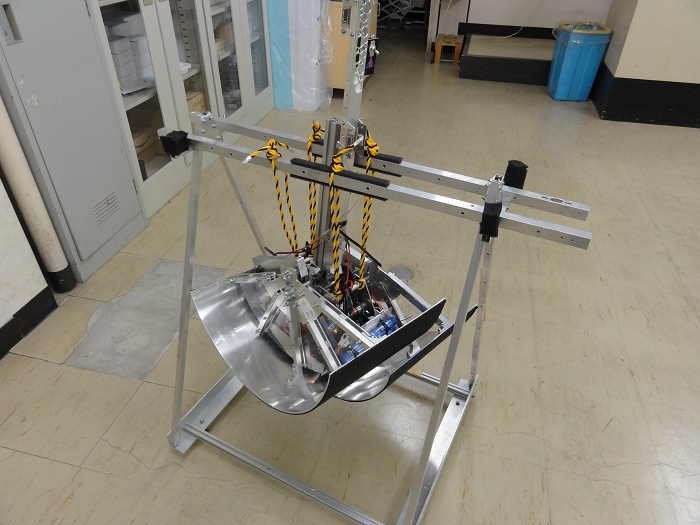
歩行機構 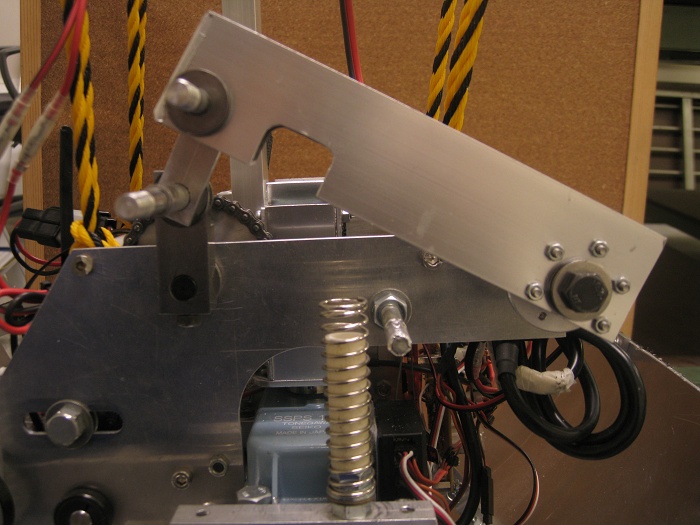
上の写真は実際にロボットで使用されているヘッケンリンク機構です.
シンプルで簡単な機構に見えると思いますが,特異点などの様々な問題があり,完璧に動作させるのにはかなり苦労しました.
リンクが動作することで,きれいな円軌道と足を持ち上げるための楕円の軌道を生成することができます.
このきれいな円軌道と丸い形状の足を組み合わせることにより,大きな歩幅でタイヤが転がるように歩行します. -
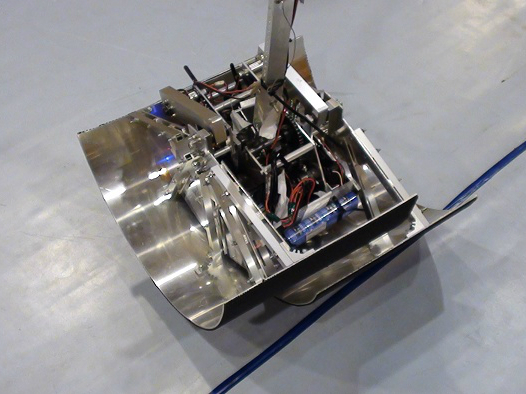
転倒防止対策構 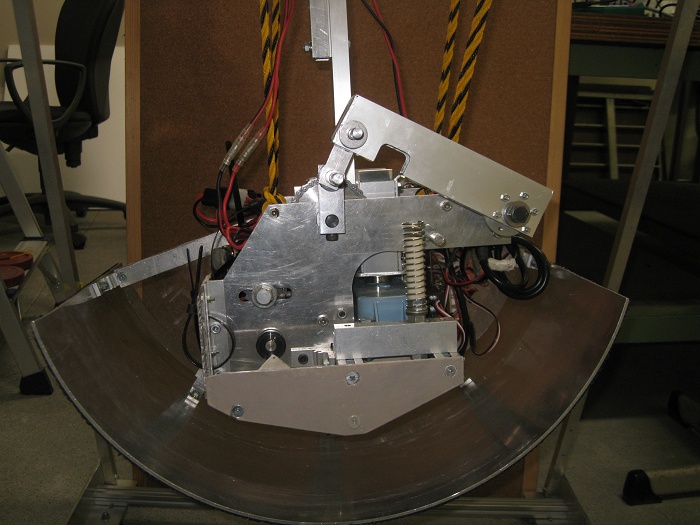
誰もが一度は乗ったことがある(?)一輪車を想像してもらえばわかると思いますが,バランスをとらないとすぐ転んじゃいますよね?
このロボットも同じように,足の形状が丸いため前後にバランスをとらないと転倒してしまいます.
そのため,転倒を防止するため低重心にしています.
写真のように,バッテリー,回路,モーターなどの足以外のパーツをなるべく本体の下方に配置することで,
多少揺れても,ダルマのように転ぶことなく歩行することができます. -
連結機構 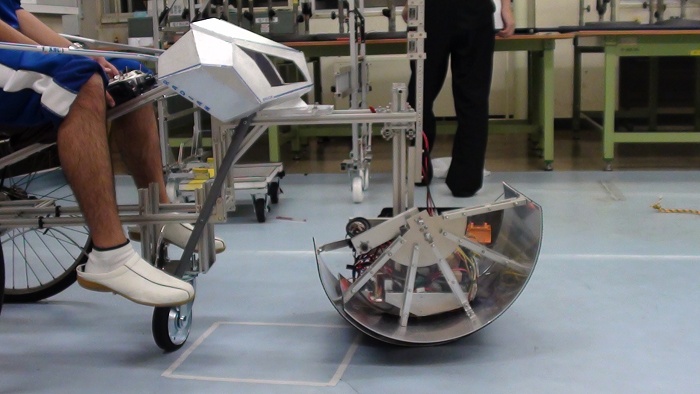
乗り物との連結は,乗り物側の連結棒をロボット側にある連結機構に挿入することにより連結を行います. 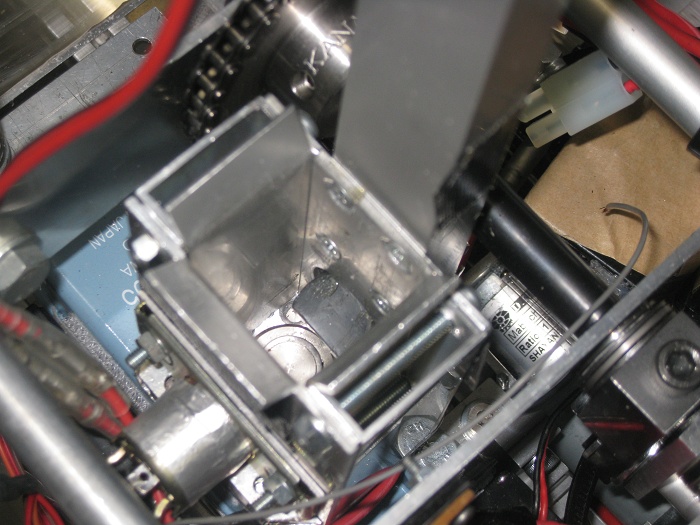
ロボット側の連結機構には,ドアをロックするための器具が二つ搭載されています.
この器具を搭載することで,乗り物側の連結棒を挿入する時にはスムーズに挿入できます.
また,奥まで連結棒が入ると連結棒の溝にロック機構がくい込み,抜けることなく簡単かつスピーディーに連結することができます.
さらに,この連結機構は大型サーボモーターとつながっているので,乗り物との連結後,ロボットを旋回させることができます. -
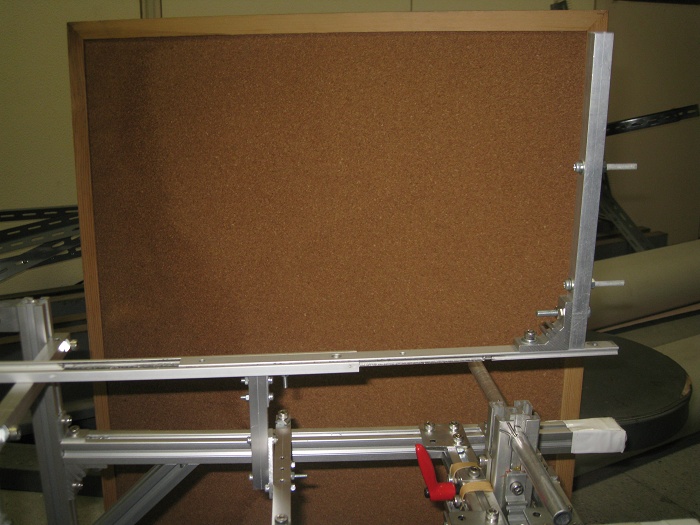
乗り物 
乗り物はロボットと連結することで三輪車のような形状になります.
乗り物の前方には,連結時に使用する連結棒があり,連結棒をロボット側の連結機構に差し込むだけで連結できる簡単な仕組みになっています.
また,スピードを意識した外装にも鍵除けの機能があり,カッコイイだけでなく機能性もあるのです.

ヘッドライトやブレーキペダルにもこだわりました. 
こちらは改良版の乗り物です. 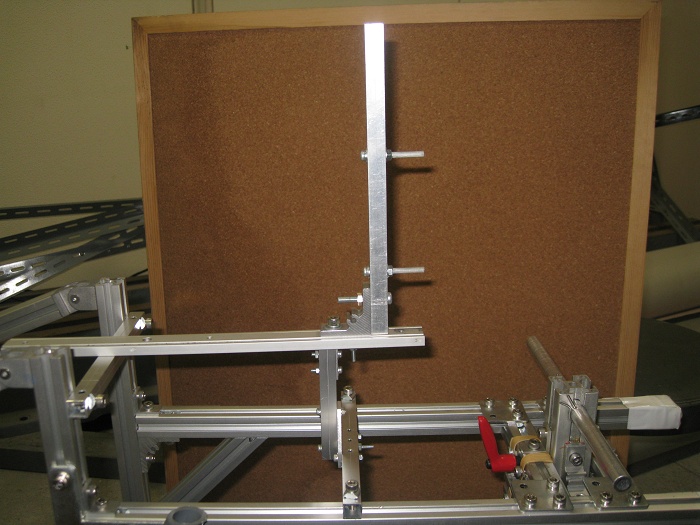
鍵の連結作業時に時間がかかるのでスライドレールに鍵を載せました.
これにより,鍵をスライドさせるだけで連結できるようになりました.
後輪を両持ちにすることで,後輪のゆがみがなくなりました.
改良版は,改良前にあった外装がないのですが,2011年の八代こども科学フェアでは見れるはず?です. -
鍵 
この鍵は私たちの間では通称「デカギ」(でかいカギ)と呼ばれています.
オヤジくさいですね(笑)
この「デカギ」なんですが,とても人気があり,若干形状がちがいますが他の高専さんの間でも使用されていました.
鍵が大きいので,ロボットが止まることなく通りすぎるだけで鍵がかかります. まさに ETCですね.
ちなみに,我がチームの「デカギ」にはかえしがついていて,鍵が鍵穴にかかったあと,振動などにより,外れないようになっています.。
こちらは改良版の鍵です.少し,他の高専さんの鍵を参考にさせていただきました. 
棒を釣竿に変えることで,大幅に軽量化することができました.
最大の改良点は,鍵爪の下方にプラスチック段ボールを取り付けたことです.
このプラ段が鍵穴にあたることで,鍵穴が揺れることを防ぐことができ,簡単に鍵をかけられます. -
鍵取り付け部 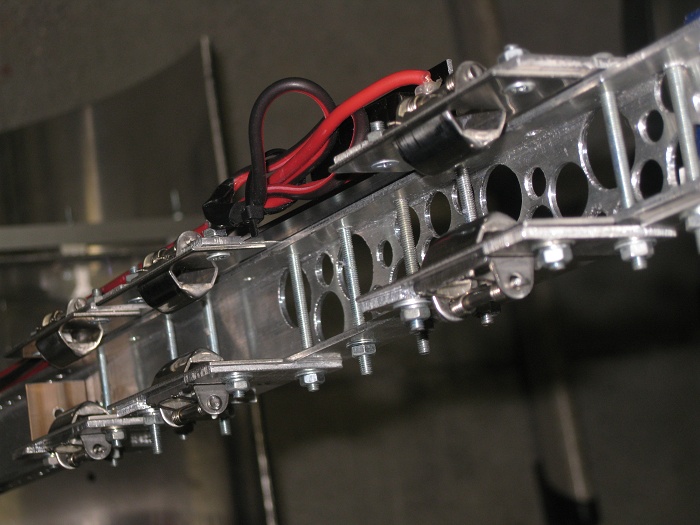
鍵の取り付け機構は,鍵の取り付ける時と鍵を外す時の両場面のことを考慮し,タンス等の家具の扉に使用されているダイキャスト三角バネを搭載しています.
このダイキャスト三角バネを使用することにより,ほどよい保持力でカギを保持でき,鍵がはずれる際も,問題なくはずすことができます. -
回路・プログラム メインのマイコンはPIC12F675,IDEはMPLABで言語はCです.
ラジコンから送信されるパルスの立ち上がりと立ち下がりを検出し,その間の時間をタイマで測定し,電源用のリレーを投入するかどうかを決めるのシンプルな制御です.
バッテリーは,回路用は9V箱電池or乾電池×(6or8),駆動用はNiCd 12Vです.
歩行機構のみにラジコンアンプ(スピードコントローラ)を採用しました.
旋回機構には,大型のサーボモータを使用しました.
ちなみにジャイロセンサでロボットの角度を検出し,制御に生かそうという案もありましたが廃止になったようです.
コントローラーは,FUTABAのラジコンプロポである送信機「T9CAP」と受信機「PCM1024」です. -
フォトギャラリー おまけです. 

-