
- power & strong -
1999年(平成11年)、RoBoCoN1999「Jump to the Future」に出場した八代高専Aチームのマシン。
4年ぶりに電気研究部がロボコンの舞台に復活した時だった。
「幅1.5mの障害物をとびこえる。」この難題に、全国のマシン製作者が頭を悩ませた。「飛翔天決」の製作者もその難題に苦労していた。カタパルトを蹴り、宙へ飛び立つ瞬間、製作者全員が息を飲んだ・・・。
今大会では2回戦で敗退したものの、NECグループ賞を受賞した。
このページは5ヶ月間、マシン製作に全てをかけた熱き部員達のドラマである。

Photo’s Deta
画像をクリックすると大きい画像が見れます。
| マシン全体図 |  |
 |
 |
| 子機と助走台 手前は子機、奥にあるのが助走台 |
大会中のマシン スタート前、子機は助走台の中に収納されている。 助走台の製作者達は子機を収納するスペースを確保しつつ展開させるギミックを考える事、軽量化、カウンターウエイト対策に全ての時間を費やした。 一方、子機の製作者達は着地時にかかる子機への衝撃、箱の取り込み、軽量化に頭を悩ませていた。 回路関係製作者達は白線の検知、自立制御を完全に成功させるよう苦労していた。 |
||
| 助走台 |  |
 |
 |
| 助走台 スタート後、子機と分離した助走台は障害物前の白線まで前進、上の写真のように展開する |
白線センサー 障害物前の白線を検知するセンサー。助走台の前方に取り付けられている。しかしなかなか白線を検知できず、苦労したところ。 |
カウンターバキューム 助走台後方に取り付けられているバキューム。子機が助走台から飛び立つ時に助走台が倒れないようにする為のカウンターウエイト。 |
|
| 助走台 | 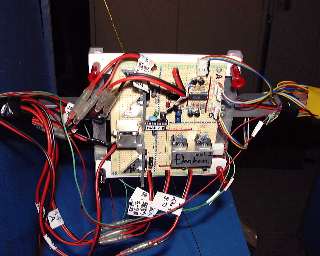 |
 |
 |
| 自立制御回路 助走台の自立制御回路。子機が助走台を離れた時にスイッチが入り、白線まで前進。助走台停止後、バキュームを作動させ、助走台を展開する |
助走台フレーム 助走台に使われているフレームの一部。大会に使われた助走台は大会1週間前に製作された為、残っている材料を繋ぎ合わせて作られた。 1週間で製作された為、製作責任者は1週間授業をサボりつつ、学校に泊り込んで製作していた(事実) |
||
| 子機 |  |
 |
|
| 子機 子機の全体図。 |
未来への飛躍 大会中の写真で、子機が助走台から飛び立つ瞬間。子機の中に箱を2個取り込んだ状態で飛ぶ。この難題が製作者全員を悩ませると共に、成功した時の大きな感動を与えた。 |
||
| 子機 |  |
 |
 |
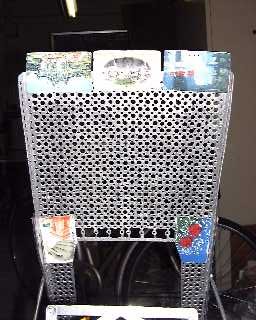
| バンパー 子機前後に取り付けられたショック吸収バンパー。このバンパーが着地時のショックを吸収。しかし1回飛ぶたびにこのバンパーは折れるので、交換の必要がある。 |
スクレイパー 箱を取り込むためのもの。先の方には箱を取り込みやすいようにテレホンカードがつけられていて、軽量化の為にアルミ板には穴が開けられている(加工時間3時間) |
バックボーンフレーム 子機のシャーシ。大会1週間前までは箱型外骨格フレームを使用していたが、強度・軽量化の為に1週間で製作された。これで約1kgの減量、アルミ板が着地時のショックを吸収する事に成功した。この製作者はこの為に3日間授業をサボるはめになった。 |
|
| ”飛翔天決”Spec | ||
| 寸法 | 1200×1200×2500(スタート時 : mm) | |
| 1200×3000×2000(助走台展開時 : mm) | ||
| 重量 | 総重量25kg(子機 約8kg) | |
| 子機 | 駆動方式 | 2モーターによるベルト4輪駆動 |
| 使用モーター | ①マクソンモーター : 詳細不明(×2個、練習時) ②日本サーボ : DME38(×2個、大会時) |
|
| 助走台 | 駆動方式 | 2モーターによる2輪駆動 |
| 使用モーター | 日本サーボ : DME60(×2個) | |
| その他 | ・カウンターバキューム(×8個) ・展開用ソレノイド(×2個) ・白線検知センサー(赤外線式) ・自立制御回路(詳細不明) |
|
| その他 | ||
| チーム | 八代高専Aチーム | |