B'2
ストーリとしては,
舞台は,田舎の森.祖父の家に少年が遊びに来ることにより物語は始まる.
普段ビルに囲まれ暮らしている少年にとって,森はとても新鮮であり,驚きの連続だった.
そこで少年は1匹のクワガタムシに出会う.
少年は自然の中で野生のクワガタムシを初めて見たが,一目見てクワガタムシが弱っていたのが分かったため,
持っていたスイカを与えた.それにより,クワガタムシは復活し,その後,遊びまわり思い出に刻んだのだった.
となります.
回路と操縦以外を1・2年生で担当しています.
クワガタムシはBeetle,少年はBoyということで,2つのBを合わせて,B'2としました.
発音や表記がよく似ている某有名アーティストにかけたわけではありません.
- 四足歩行ロボット「インノヴァーレ」
-

-
-
歩行機構 
多足歩行ロボットはカムとクランクを使った歩行機構で、生物のようなたくましい歩行を実現しました。
シンプルな構造なので高剛性かつトラブルも起きにくくなっています。
カムの形状はCAEを使ったシミュレーションによって決定し、20ミリ厚のジュラルミン板からワイヤカット放電加工で切り出しています。
実習工場の方にはホントにお世話になりました。 -
リフト機構 
ロボット内部には動滑車によって動く昇降台があり、二足歩行ロボットを持ち上て競技課題の一つである「リフト」をクリアします。
スターステージクリア時はロボット前方の腕によって体を傾け、無理やりスターステージに登ります。
地区大会終了後に改良しました.
うまく行ったのかは不明です. -
保管 
大きくてインパクトのあるロボットですが、今はその大きさのため保管場所に大変困っております。
……どうしよう。
-
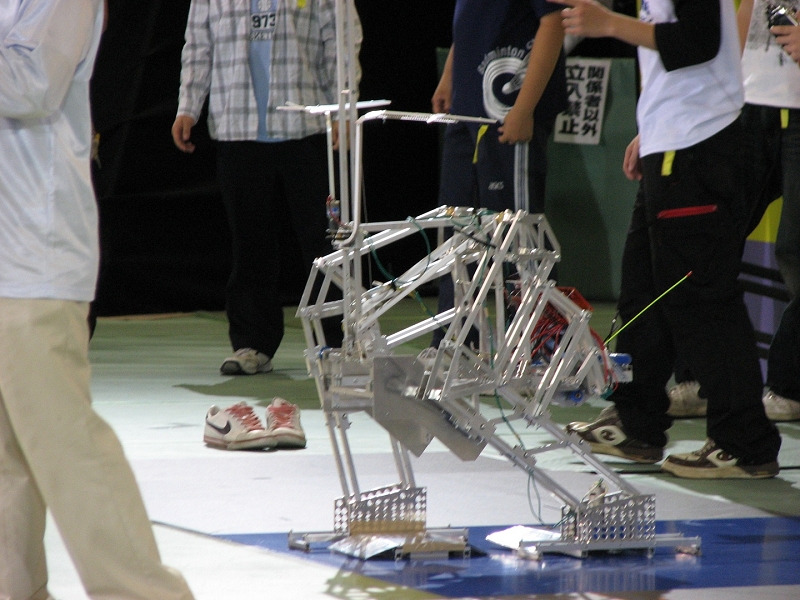
- 二足歩行ロボット「bitter」
-
-
-
歩行機構 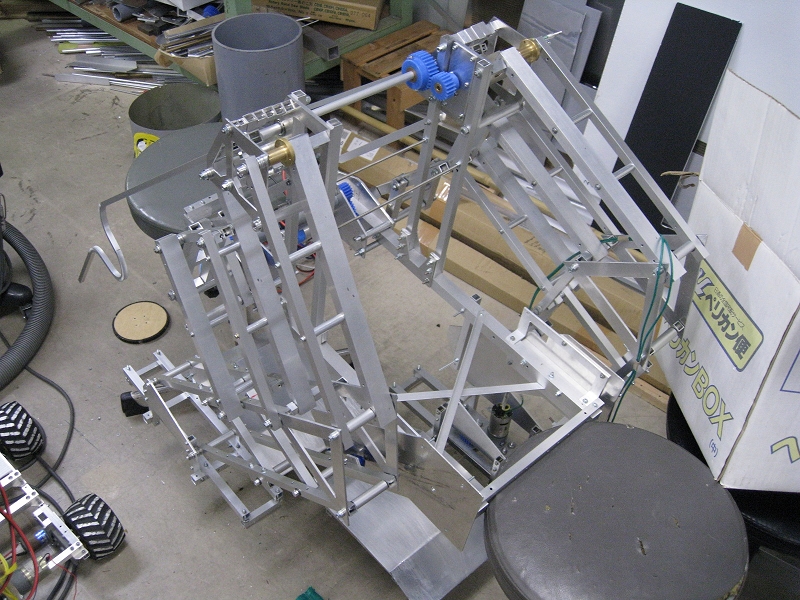
この二足歩行ロボットは、さまざまな機構を組み合わせた歩行機構を有し、重心を低くした二足歩行を実現しています。
苦労した点は…関節が増えるほど隙間が増えて、次第に自重によりたわむので、その解決に苦労しました。
試行錯誤を繰り返し、改良を重ねました。
-
- そのほかの要素
-
-
プレゼント 
プレゼントはスイカです.
折りたたみ傘を改造して作っており,スターポールにプレゼントを置くと傘が開くものです.
大きく展開することで,相手チームがスターポールにプレゼントを置きにくくするという意図もありました.
スイカは,発泡スチロール球「しんちゃーん」に塗装したものを採用しています. -
回路・プログラム 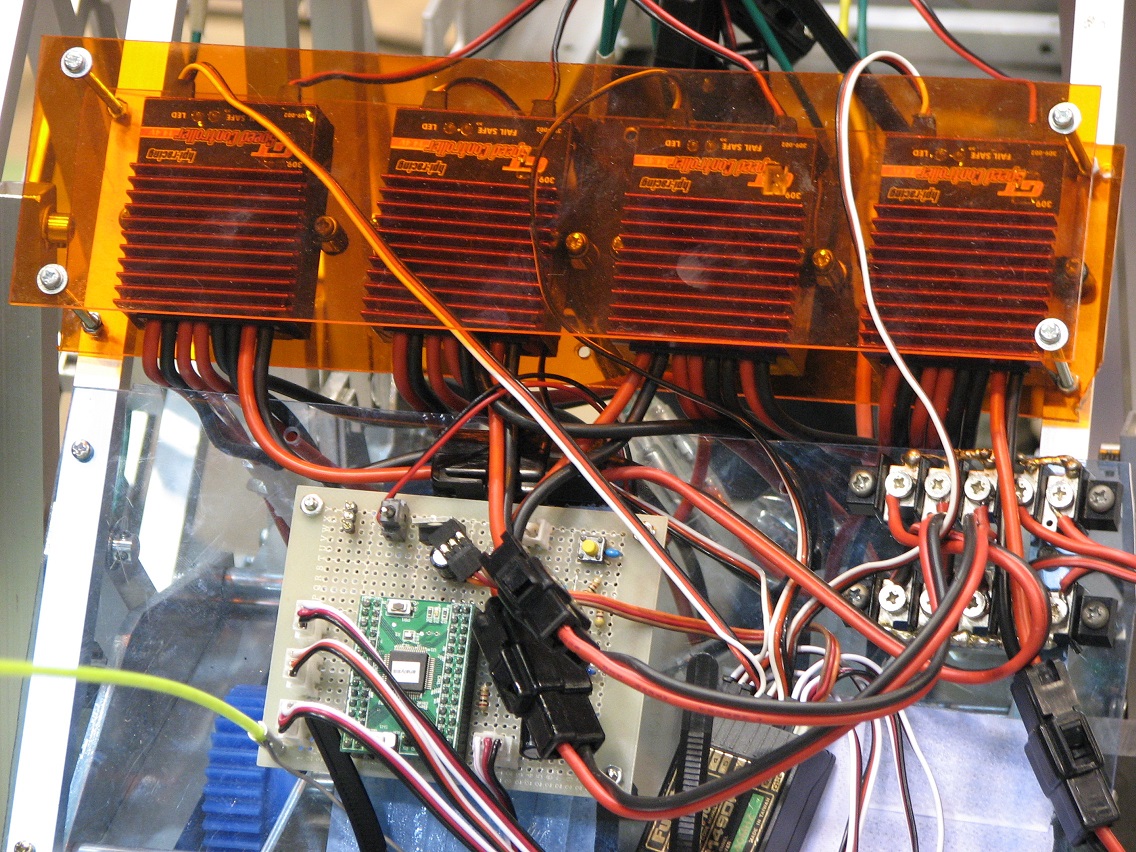
マイコンはBestTechnology社のH8/3687,統合開発環境はGCC Developer Lite,言語はCです.
モータードライバは,ラジコンのアンプを使っていました.
バッテリーはNiCdを使用しています.
コントローラはFUTABAの送信機「T9CAP」と受信機「PCM1024」です.
手動ロボット(bitter)と自動ロボット(インノヴァーレ)との間で無線通信を行っていました.
記録によると,BestTechnology社のZigbeeであるZIG-100Bを使用したようです. -
ポール 
2009年は,プレゼントポールにスターポール,スターステージなどフィールドに多額の投資が発生してしまいました.
行き場を失ったポールは2010年からロボットハウスの隣におかれ,塗装台として役立っています.
皆さんの学校ではどのような扱いになったのでしょうか?
-